转载:https://www.cnblogs.com/Lei-HongweiNO11/p/11521347.html
李群与李代数
感觉SLAM十四讲真的是深入浅出。第四讲是李群和李代数,为什么要引入这个概念呢?
在SLAM中位姿是未知的,我们需要解决“什么样的相机位姿最符合当前观测数据”,一种典型的方式是把它构建成一个优化问题,求解最优的R,t,使误差最小化。但旋转矩阵自身带有约束(正交且行列式为1),给优化带来困难。通过李群李代数可以将问题转化为无约束的优化问题。
4.1李群李代数基础
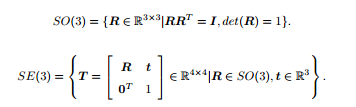
例 :特殊正交群SO(3)和特殊欧式群SE(3)对加法不封闭,对乘法封闭
对于这种只有一个运算的集合,称之为群
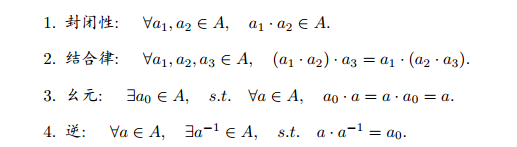
群:
是一种集合加上一种运算的代数结构。群上运算的条件如下:
李群是指具有连续(光滑)性质的群。 “想象一个刚体连续在空间中运动”---李群、
通过旋转矩阵引出李代数。过程简单总结一下。主要是从
1. 旋转矩阵的正交性RRT=I 出发,在实际中相机位姿随时间变化,将其构造为时间t的函数 R(t)R(t)T=I .
2.然后两边对时间求导,得出R(t)'R(t)T 是反对称矩阵,就可用一个向量表示。
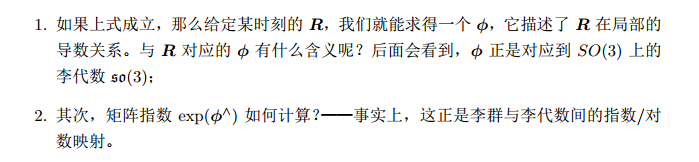
3.最后把R(t)在t=0处泰勒展开,解微分方程,得出旋转矩阵可以由exp(Φ t)计算出。这个Φ描述了R在局部的导数关系,这就是SO(3)上的李代数。
 ->
-> ->两边求导
->两边求导 ->
->  ->
->  -> 两边右乘R(t) ->
-> 两边右乘R(t) ->  -> 泰勒展开。设R(0)=I ->
-> 泰勒展开。设R(0)=I ->  ->
-> 
 -> 解微分方程 ->
-> 解微分方程 -> 
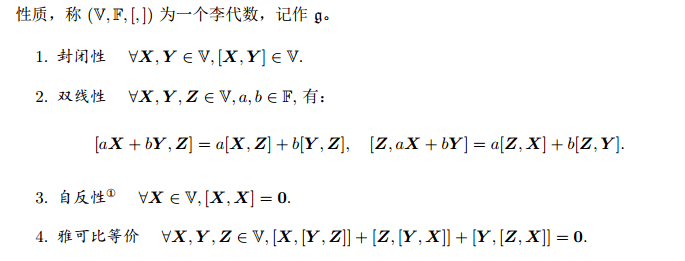
李代数的定义
李代数由一个集合v,一个数域F和一个二元运算[,]组成:
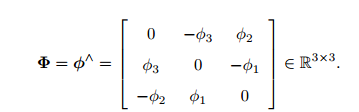
李代数so(3)
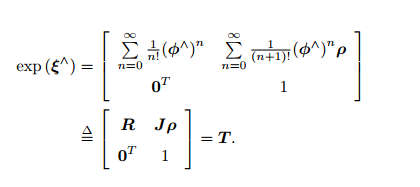
 其与so(3)的关系有指数映射给定R=exp(φ^)
其与so(3)的关系有指数映射给定R=exp(φ^)
李代数 se(3)

4.2指数与对数映射
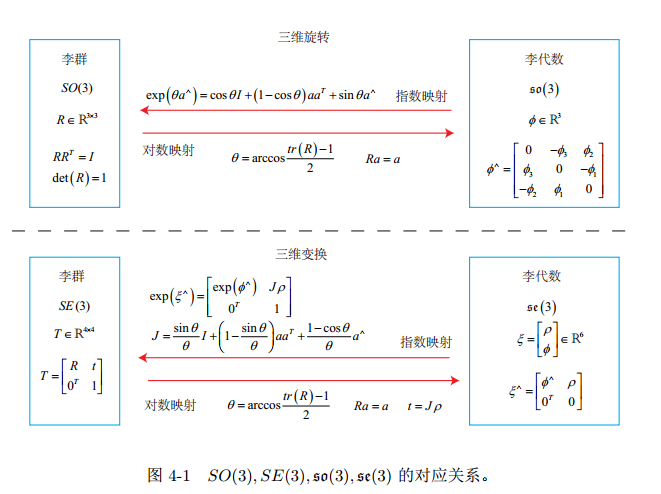
具体推导略。主要关注与SLAM利用的公式。推出SO(3)的指数映射  指数映射即为罗德里格斯公式
指数映射即为罗德里格斯公式
但是指数映射不是单射,可能存在多个李代数中的元素对应到同一个李群。但我们把旋转角度固定在-+π之间就是一一对应的。
SE(3)指数映射

4.3李代数求导与扰动模型
BCH公式:
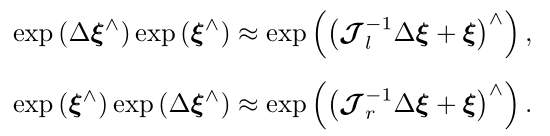
对于两个李代指数映射乘积:


以第一个近似为例。该式告诉我们,当对一个旋转矩阵 R2(李代数为 ϕ2)左乘一个微小旋转矩阵 R1(李代数为 ϕ1)时,可以近似地看作,在原有的李代数 ϕ2 上,加上了一项 Jl(ϕ2)-1ϕ1。
同理,第二个近似描述了右乘一个微小位移的情况。于是,李代数在 BCH近似下,分成了左乘近似和右乘近似两种,在使用时我们须加注意,使用的是左乘模型还是右乘模型。

假定对某个旋转 R,对应的李代数为 ϕ。我们给它左乘一个微小旋转,记作 ∆R,对应的李代数为 ∆ϕ。
那么,在李群上,得到的结果就是 ∆R · R,而在李代数上,根据 BCH近似,为: Jl-1(ϕ)∆ϕ + ϕ。合并起来,
可以简单地写成:

反之,如果我们在李代数上进行加法,让一个 ϕ 加上 ∆ϕ,那么可以近似为李群上带左右雅可比的乘法:

同样的,对于SE(3),也有:
SO(3)的李代数求导:
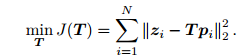
SLAM中,设某个时刻相机位姿为T,观察到了世界坐标系下位于p的点,产生了一个观测数据z,z=Tp+w.w为随机噪声。
误差e=z-Tp
所以我们就是在n组这样的数据中找一个最优T是的整体误差最小化
我们经常会构建与位姿有关的函数,然后讨论该函数关于位姿的导数,以调整当前的估计值
使用李代数解决求导问题的思路分为两种:
- 用李代数表示姿态,然后对根据李代数加法来对李代数求导。
- 对李群左乘或右乘微小扰动,然后对该扰动求导,称为左扰动和右扰动模型。
第一种方式对应到李代数的求导模型,而第二种则对应到扰动模型。
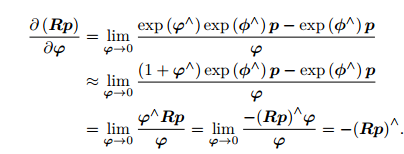
假设我们对一个空间点 p 进行了旋转,得到了 Rp。现在,要计算旋转之后点的坐标相对于旋转的导数
 ->
-> 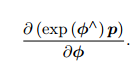
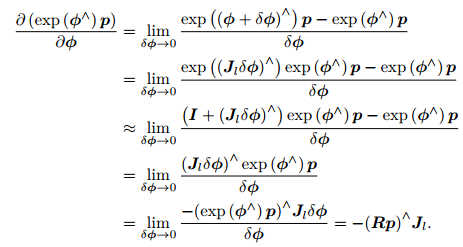
第二行的近似为 BCH 线性近似,第三行为泰勒展开舍去高阶项后近似,第四行至第五行将反对称符号看作叉积,交换之后变号。

SO3扰动模型(左乘)

SE3 李代数求导

4.4实践:
#include <iostream>
#include <cmath>
#include <Eigen/Core>
#include <Eigen/Geometry>
#include "sophus/se3.hpp"
using namespace std;
using namespace Eigen;
/// 本程序演示sophus的基本用法
int main(int argc, char **argv) {
// 沿Z轴转90度的旋转矩阵
Matrix3d R = AngleAxisd(M_PI / 2, Vector3d(0, 0, 1)).toRotationMatrix();
// 或者四元数
Quaterniond q(R);
Sophus::SO3d SO3_R(R); // Sophus::SO3d可以直接从旋转矩阵构造
Sophus::SO3d SO3_q(q); // 也可以通过四元数构造
// 二者是等价的
cout << "SO(3) from matrix:
" << SO3_R.matrix() << endl;
cout << "SO(3) from quaternion:
" << SO3_q.matrix() << endl;
cout << "they are equal" << endl;
// 使用对数映射获得它的李代数
Vector3d so3 = SO3_R.log();
cout << "so3 = " << so3.transpose() << endl;
// hat 为向量到反对称矩阵
cout << "so3 hat=
" << Sophus::SO3d::hat(so3) << endl;
// 相对的,vee为反对称到向量
cout << "so3 hat vee= " << Sophus::SO3d::vee(Sophus::SO3d::hat(so3)).transpose() << endl;
// 增量扰动模型的更新
Vector3d update_so3(1e-4, 0, 0); //假设更新量为这么多
Sophus::SO3d SO3_updated = Sophus::SO3d::exp(update_so3) * SO3_R;
cout << "SO3 updated =
" << SO3_updated.matrix() << endl;
cout << "*******************************" << endl;
// 对SE(3)操作大同小异
Vector3d t(1, 0, 0); // 沿X轴平移1
Sophus::SE3d SE3_Rt(R, t); // 从R,t构造SE(3)
Sophus::SE3d SE3_qt(q, t); // 从q,t构造SE(3)
cout << "SE3 from R,t=
" << SE3_Rt.matrix() << endl;
cout << "SE3 from q,t=
" << SE3_qt.matrix() << endl;
// 李代数se(3) 是一个六维向量,方便起见先typedef一下
typedef Eigen::Matrix<double, 6, 1> Vector6d;
Vector6d se3 = SE3_Rt.log();
cout << "se3 = " << se3.transpose() << endl;
// 观察输出,会发现在Sophus中,se(3)的平移在前,旋转在后.
// 同样的,有hat和vee两个算符
cout << "se3 hat =
" << Sophus::SE3d::hat(se3) << endl;
cout << "se3 hat vee = " << Sophus::SE3d::vee(Sophus::SE3d::hat(se3)).transpose() << endl;
// 最后,演示一下更新
Vector6d update_se3; //更新量
update_se3.setZero();
update_se3(0, 0) = 1e-4d;
Sophus::SE3d SE3_updated = Sophus::SE3d::exp(update_se3) * SE3_Rt;
cout << "SE3 updated = " << endl << SE3_updated.matrix() << endl;
return 0;
}
评估轨迹误差:
这个例子中偶groundtruth.txt和estimated.txt.两条轨迹,用以下代码读取轨迹,计算误差。
#include <iostream>
#include <fstream>
#include <unistd.h>
#include <pangolin/pangolin.h>
#include <sophus/se3.hpp>
using namespace Sophus;
using namespace std;
string groundtruth_file = "./groundtruth.txt";
string estimated_file = "./estimated.txt";
typedef vector<Sophus::SE3d, Eigen::aligned_allocator<Sophus::SE3d>> TrajectoryType;
void DrawTrajectory(const TrajectoryType >, const TrajectoryType &esti);
TrajectoryType ReadTrajectory(const string &path);
int main(int argc, char **argv) {
TrajectoryType groundtruth = ReadTrajectory(groundtruth_file);
TrajectoryType estimated = ReadTrajectory(estimated_file);
assert(!groundtruth.empty() && !estimated.empty());
assert(groundtruth.size() == estimated.size());
// compute rmse
double rmse = 0;
for (size_t i = 0; i < estimated.size(); i++) {
Sophus::SE3d p1 = estimated[i], p2 = groundtruth[i];
double error = (p2.inverse() * p1).log().norm();
rmse += error * error;
}
rmse = rmse / double(estimated.size());
rmse = sqrt(rmse);
cout << "RMSE = " << rmse << endl;
DrawTrajectory(groundtruth, estimated);
return 0;
}
TrajectoryType ReadTrajectory(const string &path) {
ifstream fin(path);
TrajectoryType trajectory;
if (!fin) {
cerr << "trajectory " << path << " not found." << endl;
return trajectory;
}
while (!fin.eof()) {
double time, tx, ty, tz, qx, qy, qz, qw;
fin >> time >> tx >> ty >> tz >> qx >> qy >> qz >> qw;
Sophus::SE3d p1(Eigen::Quaterniond(qx, qy, qz, qw), Eigen::Vector3d(tx, ty, tz));
trajectory.push_back(p1);
}
return trajectory;
}
void DrawTrajectory(const TrajectoryType >, const TrajectoryType &esti) {
// create pangolin window and plot the trajectory
pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glLineWidth(2);
for (size_t i = 0; i < gt.size() - 1; i++) {
glColor3f(0.0f, 0.0f, 1.0f); // blue for ground truth
glBegin(GL_LINES);
auto p1 = gt[i], p2 = gt[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
for (size_t i = 0; i < esti.size() - 1; i++) {
glColor3f(1.0f, 0.0f, 0.0f); // red for estimated
glBegin(GL_LINES);
auto p1 = esti[i], p2 = esti[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
}
RMSE = 2.20728 下面是可视化以后的图形
