状态机设计分析
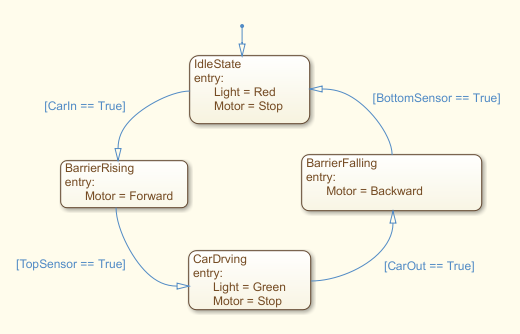
根据要求,可以分为四个状态,令起落杆上限位传感器为TopSensor,下限位传感器为BottomSensor,汽车入闸传感器为CarIn,汽车出闸传感器为CarOut,则有
- S1:Idle
- 进入时设置通行灯为红灯,电机停止。
- 当汽车入闸传感器CarIn变为True时,转移到状态S2
- S2: BarrierRising
- 进入时设置电机正转,保持通行灯状态
- 当上限位传感器TopSensor变为True时,转移到状态S3
- S3: CarDriving
- 进入时设置通行灯为绿灯,电机停止
- 当汽车出闸传感器CarOut变为True时,转移到状态S4
- S4:BarrierFalling
- 进入时设置电机反转,保持通行灯状态
- 当下限位传感器BottomSensor变为True时,转移到状态S1
根据以上设计,建立模型。
MATLAB/Simulink Stateflow 模拟运行
状态机建模
运行示例
模型文件
C++ 实现
以Simulink Stateflow的模块为模板,作出以下设计。
状态机抽象
首先,设计三个类:一个用于表示状态,可以通过一个函数,检查绑定的触发条件,并返回符合条件的下一状态。类声明如下:
class State {
public:
std::string Name;
State(std::string);
State* Trigger(void);
void Add(std::function<bool(void)> fn, State* NextState);
void SetEntry(void(*fn)(void));
void Entry(void);
private:
std::vector<std::function<bool(void)>> Condition;
std::vector<State*> NextState;
void (*FnEntry)(void);
};
class Machine {
public:
Machine(State *InitState);
void SetState(State *state);
State *Curr;
void Trigger(void);
};
一个类为布尔型传感器类,继承于传感器类模版。声明分别为:
template <typename T>
class TSensor {
protected:
T value;
public:
TSensor(){}
TSensor(T value) {
this->Set(value);
}
void Set(T value) {
this->value = value;
}
T Get(void) {
return this->value;
}
};
class BoolSensor: public TSensor<bool> {
public:
BoolSensor(bool value);
bool IsTrue(void);
bool IsFalse(void);
};
另一个类则为模拟机,模拟触发状态检查,并维护状态机的当前状态,同时在改变状态时能够触发相应的进入操作。类声明如下:
class Machine {
public:
Machine(State *InitState);
void SetState(State *state);
State *Curr;
void Trigger(void);
};
组装模型
// 定义传感器
// 测试模型时所有传感器默认值均设为true,正常情况应默认为false
BoolSensor CarIn{true};
BoolSensor CarOut{true};
BoolSensor TopSensor{true};
BoolSensor BottomSensor{true};
// 定义状态
State S1{"Idle"};
State S2{"Barrier Rising"};
State S3{"Car Driving"};
State S4{"Barrier Falling"};
// 设置状态转移及入口动作
S1.SetEntry(&S1_Entry);
S1.Add(std::bind(&BoolSensor::IsTrue, &CarIn), &S2);
S2.SetEntry(&S2_Entry);
S2.Add(std::bind(&BoolSensor::IsTrue, &TopSensor), &S3);
S3.SetEntry(&S3_Entry);
S3.Add(std::bind(&BoolSensor::IsTrue, &CarOut), &S4);
S4.SetEntry(&S4_Entry);
S4.Add(std::bind(&BoolSensor::IsTrue, &BottomSensor), &S1);
其中,SetEntry为设置状态机的进入状态时的触发动作。
初始化并模拟运行
初始状态为S1,即Idle状态。
Machine simulate{&S1};
while (1) {
simulate.Trigger();
sleep(1);
}
运行效果
Set State <Idle>
Light: Red
Motor: Stop
Switch From <Idle> to <Barrier Rising>
Light: Red
Motor: Forward Revolute
Switch From <Barrier Rising> to <Car Driving>
Light: Green
Motor: Stop
Switch From <Car Driving> to <Barrier Falling>
Light: Green
Motor: Backward Revolute
Switch From <Barrier Falling> to <Idle>
Light: Red
Motor: Stop
...
源代码
References
[1] [https://cn.mathworks.com/help/stateflow/ug/programming-your-chart-with-matlab-syntax.html]