霍夫直线变换介绍
Hough Line Transform用来做直线检测
前提条件 – 边缘检测已经完成
平面空间到极坐标空间转换

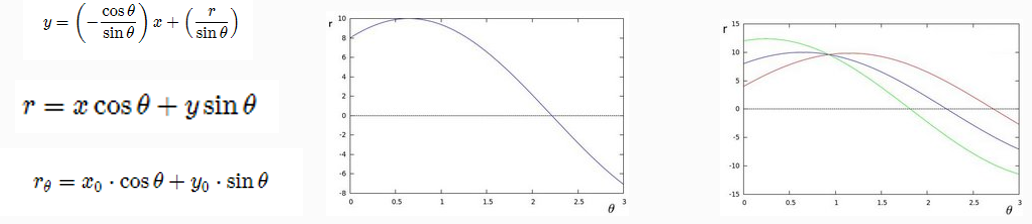
对于任意一条直线上的所有点来说,变换到极坐标中,从[0~360]空间,可以得到r的大小
属于同一条直线上点在极坐标空(r, theta)必然在一个点上有最强的信号出现,根据此反算到平面坐标中就可以得到直线上各点的像素坐标。从而得到直线.
标准的霍夫变换 cv::HoughLines从平面坐标转换到霍夫空间,最终输出是 表示极坐标空间
表示极坐标空间
霍夫变换直线概率 cv::HoughLinesP最终输出是直线的两个点
cv::HoughLines( InputArray src, // 输入图像,必须8-bit的灰度图像 OutputArray lines, // 输出的极坐标来表示直线 double rho, // 生成极坐标时候的像素扫描步长 double theta, // 生成极坐标时候的角度步长,一般取值CV_PI/180 int threshold, // 阈值,只有获得足够交点的极坐标点才被看成是直线 double srn=0; // 是否应用多尺度的霍夫变换,如果不是设置0表示经典霍夫变换 double stn=0; // 是否应用多尺度的霍夫变换,如果不是设置0表示经典霍夫变换 double min_theta=0; // 表示角度扫描范围 0 ~180之间, 默认即可 double max_theta=CV_PI ) // 一般情况是有经验的开发者使用,需要自己反变换到平面空间
cv::HoughLinesP( InputArray src, // 输入图像,必须8-bit的灰度图像 OutputArray lines, // 输出的极坐标来表示直线 double rho, // 生成极坐标时候的像素扫描步长 double theta, //生成极坐标时候的角度步长,一般取值CV_PI/180 int threshold, // 阈值,只有获得足够交点的极坐标点才被看成是直线 double minLineLength=0; // 最小直线长度 double maxLineGap=0; // 最大间隔 )
int main(int argc, char** argv) { Mat src, src_gray, dst; src = imread(STRPAHT3); if (!src.data) { printf("could not load image... "); return -1; } //边缘检测 Canny(src, src_gray, 150, 200); //灰度 cvtColor(src_gray, dst, CV_GRAY2BGR); /* vector<Vec2f> lines; HoughLines(src_gray, lines, 1, CV_PI / 180, 150, 0, 0); for (size_t i = 0; i < lines.size(); i++) { float rho = lines[i][0]; // 极坐标中的r长度 float theta = lines[i][1]; // 极坐标中的角度 Point pt1, pt2; double a = cos(theta), b = sin(theta); double x0 = a * rho, y0 = b * rho; // 转换为平面坐标的四个点 pt1.x = cvRound(x0 + 1000 * (-b)); pt1.y = cvRound(y0 + 1000 * (a)); pt2.x = cvRound(x0 - 1000 * (-b)); pt2.y = cvRound(y0 - 1000 * (a)); line(dst, pt1, pt2, Scalar(0, 0, 255), 1, CV_AA); }*/ vector<Vec4f> plines;
//霍夫直线检测 HoughLinesP(src_gray, plines, 1, CV_PI / 180.0, 10, 0, 10); Scalar color = Scalar(0, 0, 255); for (size_t i = 0; i < plines.size(); i++) { Vec4f hline = plines[i]; line(dst, Point(hline[0], hline[1]), Point(hline[2], hline[3]), color, 3, LINE_AA); } imshow("OUTPUT_TITLE", dst); waitKey(0); return 0; }