一、背景
动态模型 = 图 + 时间
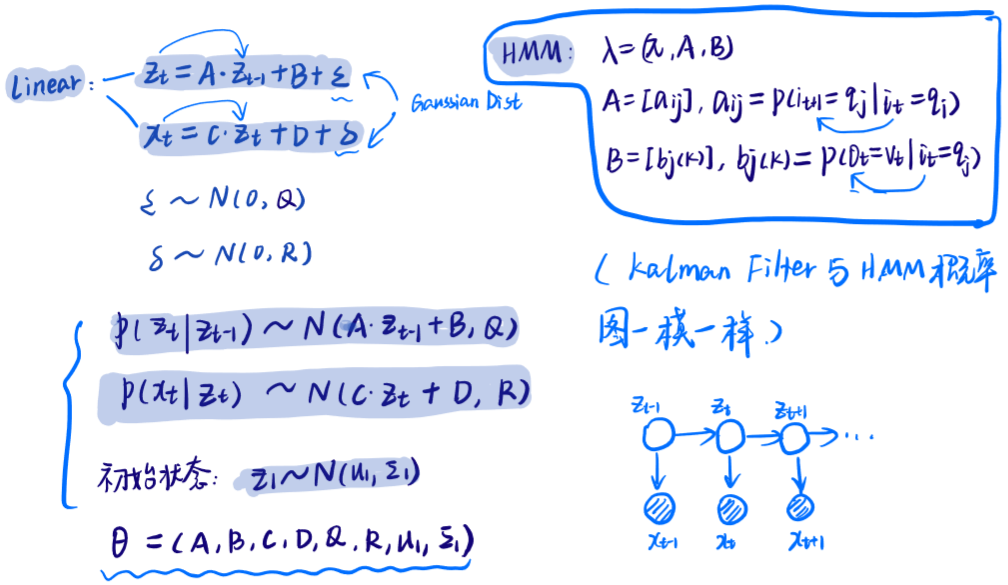
动态模型有三种:HMM、线性动态系统(kalman filter)、particle filter
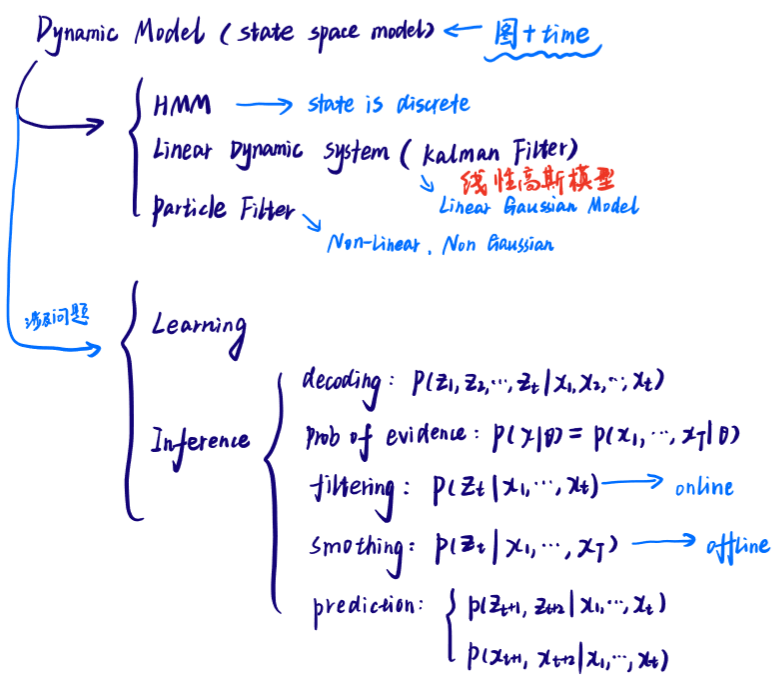
线性动态系统与HMM的区别是假设相邻隐变量之间满足线性高斯分布,观测变量与隐变量之间满足线性高斯分布
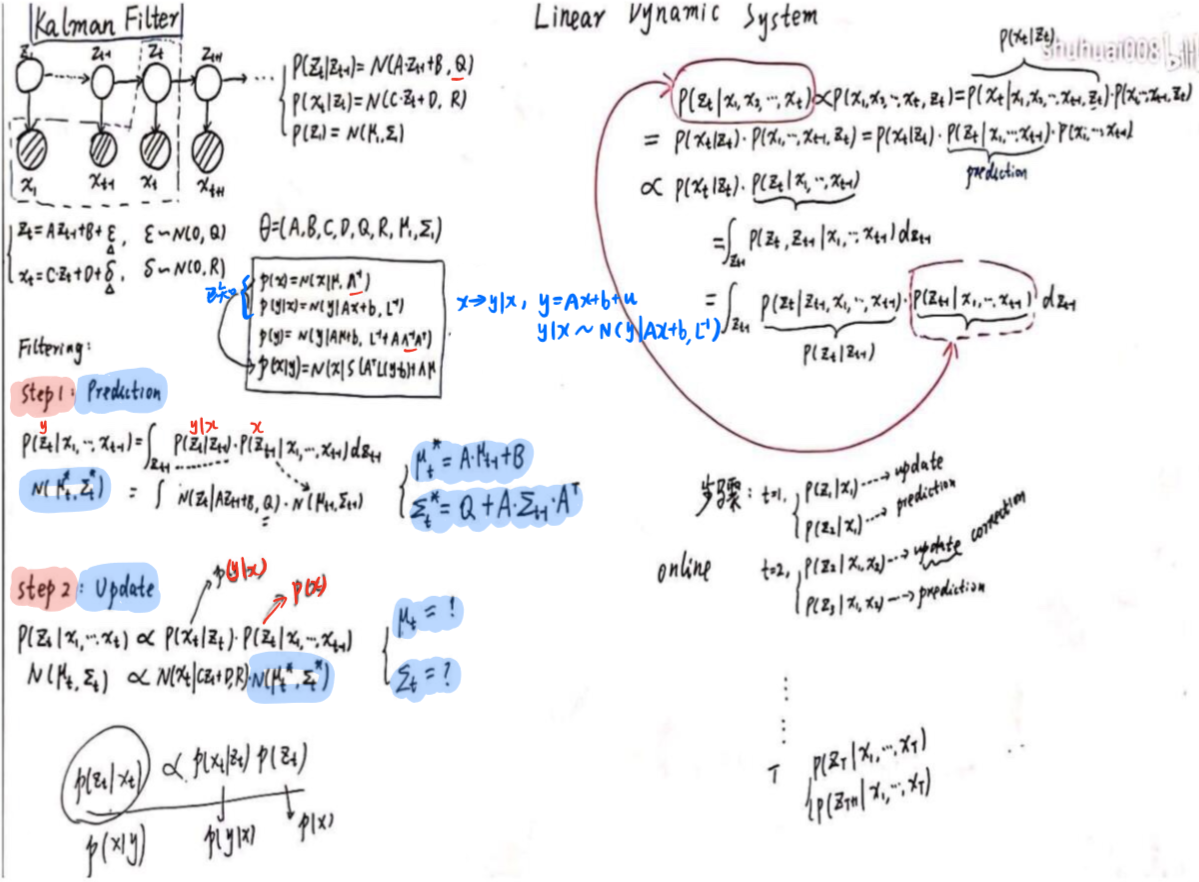
二、线性动态系统两大问题:learning+inference
主要讲inference,相当于求后验p(z|x)

求p(zt|x1,x2,...,xt)转换成求p(zt-1|x1,...,xt-1)和p(zt|zt-1),依次类推
具体分为两步骤:
step1: prediction
step2: update