对于任何一款芯片,GPIO接口是其最基本的组成部分,也是一款芯片入门的最基本操作,下面论述下 关于esp32开发版的GPIO操作,本文中重点讲解下
关于如何创建eclipse工程,并通过eclipse下载到esp32中去(本文的工程文件在esp-idf/example/periheral文件夹中gpio工程),这里就不再详细论述了,可以看前面的文章,本文重点讲解工程源码,现在讲代码分块粘贴如下,并进行讲解。
本次操作比较简单,大致可以分为以下几个部分
PART1;
定义gpio口寄存器及一个空的xQueueHandle类型的返回信号量。
#define GPIO_OUTPUT_IO_0 18 #define GPIO_OUTPUT_IO_1 19 #define GPIO_OUTPUT_PIN_SEL ((1<<GPIO_OUTPUT_IO_0) | (1<<GPIO_OUTPUT_IO_1)//配置gpioout位寄存器
#define GPIO_INPUT_IO_0 4 #define GPIO_INPUT_IO_1 5 #define GPIO_INPUT_PIN_SEL ((1<<GPIO_INPUT_IO_0) | (1<<GPIO_INPUT_IO_1)) #define ESP_INTR_FLAG_DEFAULT 0 //定义默认的中断标志为0 static xQueueHandle gpio_evt_queue = NULL; //定义一个队列返回变量
PART2:
编写中断处理函数及信号输出任务
static void IRAM_ATTR gpio_isr_handler(void* arg) { uint32_t gpio_num = (uint32_t) arg; xQueueSendFromISR(gpio_evt_queue, &gpio_num, NULL); //xQueueSendFromISR是发生消息插入到队列的后面,将gpio的io口数传递到队列中,关于xQueueSendFromISR函数的相关知识,可以自己查询API手册,本文最后也有相关讲解 } static void gpio_task_example(void* arg) { uint32_t io_num; for(;;) { if(xQueueReceive(gpio_evt_queue, &io_num, portMAX_DELAY)) { //接受gpio队列,并在读取完后删除队列 printf("GPIO[%d] intr, val: %d ", io_num, gpio_get_level(io_num)); //将GPIO的信息打印输出 } } }
PART3:
应用主程序
1 void app_main() 2 { 3 gpio_config_t io_conf; 4 //定义一个gpio_config类型的结构体,下面的都算对其进行的配置 5 //disable interrupt 6 io_conf.intr_type = GPIO_PIN_INTR_DISABLE; 7 //set as output mode 8 io_conf.mode = GPIO_MODE_OUTPUT; 9 //bit mask of the pins that you want to set,e.g.GPIO18/19 10 io_conf.pin_bit_mask = GPIO_OUTPUT_PIN_SEL; 11 //disable pull-down mode 12 io_conf.pull_down_en = 0; 13 //disable pull-up mode 14 io_conf.pull_up_en = 0; 15 //configure GPIO with the given settings 16 gpio_config(&io_conf); 17 18 //interrupt of rising edge 19 io_conf.intr_type = GPIO_PIN_INTR_POSEDGE; 20 //bit mask of the pins, use GPIO4/5 here 21 io_conf.pin_bit_mask = GPIO_INPUT_PIN_SEL; 22 //set as input mode 23 io_conf.mode = GPIO_MODE_INPUT; 24 //enable pull-up mode 25 io_conf.pull_up_en = 1; 26 gpio_config(&io_conf); 27 28 //change gpio intrrupt type for one pin 29 gpio_set_intr_type(GPIO_INPUT_IO_0, GPIO_INTR_ANYEDGE); 30 31 //create a queue to handle gpio event from isr 32 gpio_evt_queue = xQueueCreate(10, sizeof(uint32_t)); 33 //start gpio task 34 xTaskCreate(gpio_task_example, "gpio_task_example", 2048, NULL, 10, NULL); 35 // 36 //install gpio isr service 37 gpio_install_isr_service(ESP_INTR_FLAG_DEFAULT); 38 //hook isr handler for specific gpio pin 39 gpio_isr_handler_add(GPIO_INPUT_IO_0, gpio_isr_handler, (void*) GPIO_INPUT_IO_0); 40 //hook isr handler for specific gpio pin 41 gpio_isr_handler_add(GPIO_INPUT_IO_1, gpio_isr_handler, (void*) GPIO_INPUT_IO_1); 42 43 //remove isr handler for gpio number. 44 gpio_isr_handler_remove(GPIO_INPUT_IO_0); 45 //hook isr handler for specific gpio pin again 46 gpio_isr_handler_add(GPIO_INPUT_IO_0, gpio_isr_handler, (void*) GPIO_INPUT_IO_0); 47 48 int cnt = 0; 49 while(1) { 50 printf("cnt: %d ", cnt++); 51 vTaskDelay(1000 / portTICK_RATE_MS); 52 gpio_set_level(GPIO_OUTPUT_IO_0, cnt % 2); 53 gpio_set_level(GPIO_OUTPUT_IO_1, cnt % 2); 54 } 55 }
app_main中第三行申明gpio配置的结构体实例,然后在其后对gpio的结构体进行配置,然后开启一个gpio_task_example的任务处理GPIO4或者GPIO5中断发来的消息,这里用到FreeRTOS操作系统的消息队列功能实现中断函数与用户任务之间的消息传递。
在44,46行中调用函数给 GPIO4和GPIO5管脚添加中断处理函数,并在最后的while循环中每隔1s切换一次GPIO18、GPIO19的电平值,
实验现象:
对于本例子的实验例子,实验操作是,将程序烧写到esp32中后,将GPIO18->GPIO4,GPIO19->GPIO5(—>表示连接),然后打开minicom(任意串口调试软件),可以看到每隔一秒gpio输出一次信息。由于app_main中第29行修改了GPIO_INPUT_IO_0为GPIO_INTR_ANYEDGE(即GPIO18的中断方式,所以,GPIO18的中断会比19多一次)。实验输出如下图所示:

小TIPS:
对于不知道的变量,想要找到其定义,选中想要查询的变量,按下F3即可自动跳转到其定义处,同理,选中,按F4可以看到此变量或函数被谁调用了。
相关知识:
1、esp32函数API:gpio口的函数API
2、FreeRTOS函数API:
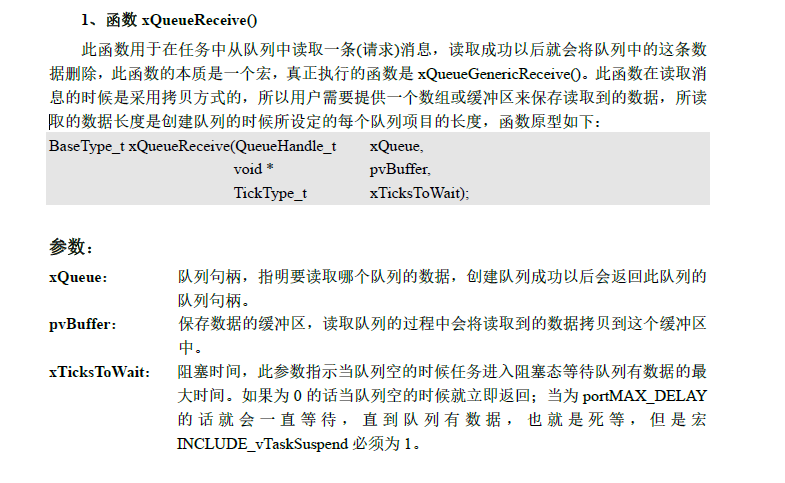
以下截图来自正点原子FreeRTOS开发手册