https://en.wikipedia.org/wiki/Circle_of_confusion
https://developer.download.nvidia.com/books/HTML/gpugems/gpugems_ch23.html
 (1)
(1)
F是焦距 P是对焦距离
I是成像位置
因为F是固定的 P可以通过调节I来确定 就是说移动film位置可以改变对焦位置P( 对于照相机来说
A是光圈直径 算法中会用另外一个参数 f-number ---N= F/A 焦距/镜头直径 所以A = F/N
C= abs(F*F(P-D)/(N*D(P-F)))
D是物体的线性深度
N是镜头的参数 焦距与镜头直径的ratio
(1)式推导过程
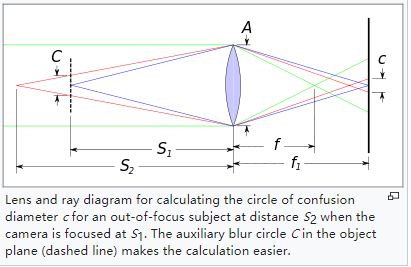
SI 是P 对焦距离
f 是F 焦距
fI 是I 胶片距离
S2 是D物体线性深度
因为1/SI+1/fI=1/f
1/P +1/I=1/F
so fI=(SI-f)/(f*SI)
I=FP/(P-F)
buz C/A=abs(S2-SI)/S2
C/A =abs(D-P)/D
buz C/c =SI/fI
C/c = P/I
c=IA(D-P)/PD
带入I
c=abs(A*F*(D-P)/(D*(P-F)))
带入A=F/N
c=abs(F^2(D-P)/(N*D*(P-F)))