Harris算子以及未来规划...
找工作的时候,被问到了harris,面试官问梯度矩阵特征值在边缘区域的分布情况。当时答的感觉也没啥问题,但面试官就是在我说出答案后特别诧异.....回来后挺难过.....后来又问了相机标定的流程,我只敢写个相机模型,没怎么答上来相机标定怎么计算。。感觉coding还是不够深入,找到工作后,发现自己很多不足的地方。打算赶紧抢救下。。
1.Harris 实现,这个应该不难。
2.多尺度的harris ,Hessian,DoG,HarrisLaplace,HessianLaplace,看看论文和VLFeat 实现下。
3.相机标定,在看机器人视觉测量与控制这本书,近几天不忙应该能coding一个basic相机标定的算法。
4.再把三大特征看完 HoG,Harr,LBP
4.1看下HDR的论文,实现一下算法过程,此外把scaling 图像缩放看一下
5.项目上面的话,线结构光的可以改进下激光平面标定的算法,用PNP算一下
6.把PNP的视频看完,还有几篇论文。
7.做一下知识管理,找工作后发现好的知识管理和高效率很重要。
8.未来:关注物体检测(FastRCNN和YOLO)人脸识别,以及人脸特征点。以及GIMP的源码。写点linux上跑的图像处理软件。
9.学习层面的话,先把操作系统,算法设计看完,计算机网络也恶补一下,开始入嵌入式操作系统的坑,最好是把安卓移植过程了解清楚,以及安卓的一些坑。
10.再长远的话学java,入安卓的坑了,写一点在安卓上跑的app。
以下是Harris C++源码:
参考过https://github.com/RonnyYoung/ImageFeatures/blob/master/source/harris.cpp
在处理非极大抑制上做的蛮好。
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <math.h>
using namespace std;
using namespace cv;
class CmpHarris
{
public:
CmpHarris(const Mat& img, int threshold = 0.01, float _lamada = 0.04) : thresh(threshold), lamada(_lamada) {
if (img.channels() == 3)
{
cvtColor(img, image, CV_RGB2GRAY);
image.convertTo(image, CV_32FC1);
}
else
{
image = img.clone();
image.convertTo(image, CV_32FC1);
}
gradx2 = cv::Mat::zeros(img.size(), CV_32FC1);
grady2 = cv::Mat::zeros(img.size(), CV_32FC1);
gradxy = cv::Mat::zeros(img.size(), CV_32FC1);
};
void CmpHarris::getHarrisRespose(vector<Point2d> &response,Mat& res);
~CmpHarris()
{
}
private:
Mat image;
Mat gradx2;
Mat grady2;
Mat gradxy;
float thresh;
float lamada;
int cmpSobel(Mat& image, Mat& gardx2, Mat& gardy2, Mat& gardxy);
int Harris(vector<Point2d> &response,Mat& res, Mat& gradx2, Mat& grady2, Mat & gradxy, float thresh, float lamada);
};
int CmpHarris::cmpSobel(Mat& image, Mat& gardx2, Mat& gardy2, Mat& gradxy)
{
int width = image.cols;
int height = image.rows;
Mat gradX, gradY;
gradX = Mat::zeros(gradx2.size(), CV_32FC1);
gradY = Mat::zeros(grady2.size(), CV_32FC1);
for (int i = 1; i < height - 1; i++)
{
float* data = image.ptr<float>(i);
float* gradxd = gradX.ptr<float>(i);
float* gradyd = gradY.ptr<float>(i);
float* updata = image.ptr<float>(i - 1);
float* downdata = image.ptr<float>(i + 1);
for (int j = 1; j < width - 1; j++)
{
float gradx, grady;
float a00, a01, a02, a10, a12, a20, a21, a22;
a00 = updata[j - 1]; a01 = updata[j]; a02 = updata[j + 1];
a10 = data[j - 1]; a12 = data[j + 1];
a20 = downdata[j - 1]; a21 = downdata[j]; a22 = downdata[j + 1];
/*gradx = -a00 - a10 * 2 - a20 + a02 + 2 * a12 + a22;
grady = -a00 - a01 * 2 - a02 + a20 + 2 * a21 + a22;*/
gradx = -a00 - a10 * 2 - a20 + a02 + 2 * a12 + a22;
grady = -a00 - a01 * 2 - a02 + a20 + 2 * a21 + a22;
gradxd[j] = gradx;
gradyd[j] = grady;
}
}
gradx2 = gradX.mul(gradX);
grady2 = gradY.mul(gradY);
gradxy = gradX.mul(gradY);
return 1;
}
int CmpHarris::Harris(vector<Point2d> &response,Mat& res, Mat& gradx2, Mat& grady2, Mat & gradxy,float thresh, float lamada)
{
//首先进行行卷积
Mat gaussKernel = getGaussianKernel(7, 2);
Mat HarrisResponse;
HarrisResponse = Mat::zeros(gradx2.size(),CV_32FC1);
filter2D(gradx2, gradx2, CV_32FC1, gaussKernel);
filter2D(grady2, grady2, CV_32FC1, gaussKernel);
filter2D(gradxy, gradxy, CV_32FC1, gaussKernel);
for (int i = 0; i < gradx2.rows; i++)
{
float* dataRes = HarrisResponse.ptr<float>(i);
for (int j = 0; j < gradx2.cols; j++)
{
float sumGradx2, sumGrady2, sumGradxy;
sumGradx2 = sumGrady2 = sumGradxy = 0;
sumGradx2 = gradx2.at<float>(i, j);
sumGrady2 = grady2.at<float>(i, j);
sumGradxy = gradxy.at<float>(i, j);
float det_m = sumGradx2 *sumGrady2 - sumGradxy * sumGradxy;
float trace_m = sumGradx2 + sumGrady2;
dataRes[j] = det_m - lamada * trace_m * trace_m;
}
}
//NMS + aaaaaaaaaaaaaa
double maxResponse = 0;
minMaxLoc(HarrisResponse, NULL, &maxResponse,NULL,NULL);
Mat dilated;
Mat localMax;
//膨胀就是求局部最大值的操作,核B与图形卷积,
//即计算核B覆盖的区域的像素点的最大值,
//并把这个最大值赋值给参考点指定的像素
dilate(HarrisResponse, dilated, Mat());
compare(HarrisResponse, dilated, localMax, CMP_EQ);
Mat cornerMap;
double qualityLevel = 0.01;
double threshs = qualityLevel * maxResponse;
cornerMap = HarrisResponse > threshs;
bitwise_and(cornerMap, localMax, res);
for (int i = 0; i < res.rows; i++)
{
uchar* p = res.ptr<uchar>(i);
for (int j = 0; j < res.cols; j++)
{
if (p[j])
{
response.push_back(Point2d(i, j));
}
}
}
/*imshow("cv1", dilated);
imshow("c2", HarrisResponse);
imshow("cv3", localMax);
imshow("cv4", res);
waitKey(0);
*/
return 1;
}
void CmpHarris::getHarrisRespose(vector<Point2d> &response,Mat& res)
{
cmpSobel(this->image, this->gradx2, this->grady2, this->gradxy);
Harris(response,res, this->gradx2, this->grady2, this->gradxy, this->thresh, this->lamada);
}
int main(int argc, char **argv) {
cv::Mat im;
Mat image, res, res_norm, res_norm_scale;
vector<Point2d> HarrisRespose;
im = cv::imread("D://2.jpg");
CmpHarris harris(im, 0.01, 0.04);
harris.getHarrisRespose(HarrisRespose,res);
if (!HarrisRespose.empty())
{
for (int i = 0; i < HarrisRespose.size(); i++)
{
Point FeatPoint(HarrisRespose[i].y, HarrisRespose[i].x);
circle(im, FeatPoint, 1, CV_RGB(0, 255, 0), 2, 0, 0);
}
}
namedWindow("harris");
imshow("harris", im);
waitKey(0);
return 0;
}
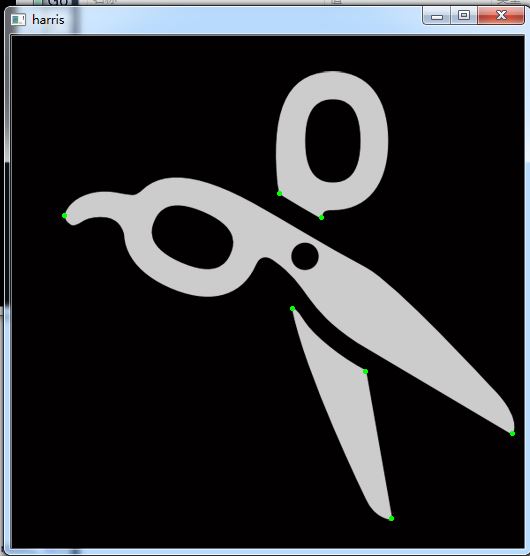
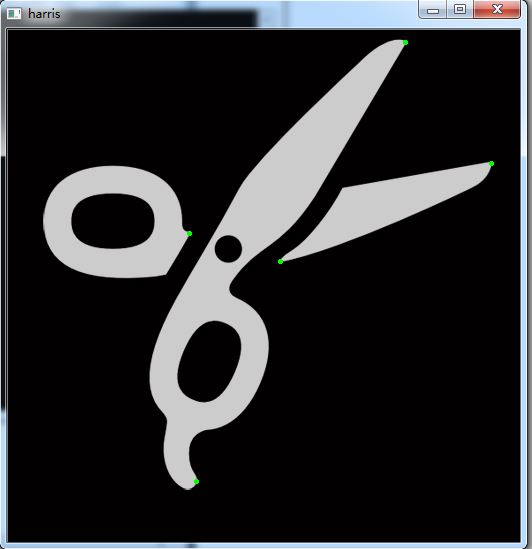
上图是C++版本生成harris角点
下面是matlab版本的:
% in_image-待检测的rgb图像数组
% a--角点参数响应,取值范围:0.04~0.06
% [posr,posc]-角点坐标
in_image = imread('D:\2.jpg');
a = 0.04;
in_image=rgb2gray(in_image);
I=double(in_image);
%%%%计算xy方向梯度%%%%%
fx=[-1,0,1];%x方向梯度模板
Ix=filter2(fx,I);%x方向滤波
fy=[-1;0;1];%y方向梯度模板(注意是分号)
Iy=filter2(fy,I);
%%%%计算两个方向梯度的乘积%%%%%
Ix2=Ix.^2;
Iy2=Iy.^2;
Ixy=Ix.*Iy;
%%%%使用高斯加权函数对梯度乘积进行加权%%%%
%产生一个7*7的高斯窗函数,sigma值为2
h=fspecial('gaussian',[7,7],2);
IX2=filter2(h,Ix2);
IY2=filter2(h,Iy2);
IXY=filter2(h,Ixy);
%%%%%计算每个像元的Harris响应值%%%%%
[height,width]=size(I);
R=zeros(height,width);
%像素(i,j)处的Harris响应值
for i=1:height
for j=1:width
M=[IX2(i,j) IXY(i,j);IXY(i,j) IY2(i,j)];
R(i,j)=det(M)-a*(trace(M))^2;
end
end
%%%%%去掉小阈值的Harris值%%%%%
Rmax=max(max(R));
%阈值
t=0.01*Rmax;
for i=1:height
for j=1:width
if R(i,j)<t
R(i,j)=0;
end
end
end
figure
imshow(R);
hold on
%%%%%进行3*3领域非极大值抑制%%%%%%%%%
corner_peaks=imregionalmax(R);
%imregionalmax对二维图片,采用8领域(默认,也可指定)查找极值,三维图片采用26领域
%极值置为1,其余置为0
num=sum(sum(corner_peaks));
%%%%%%显示所提取的Harris角点%%%%
[posr,posc]=find(corner_peaks==1);
figure
imshow(in_image);
hold on
for i=1:length(posr)
plot(posc(i),posr(i),'r+');
end
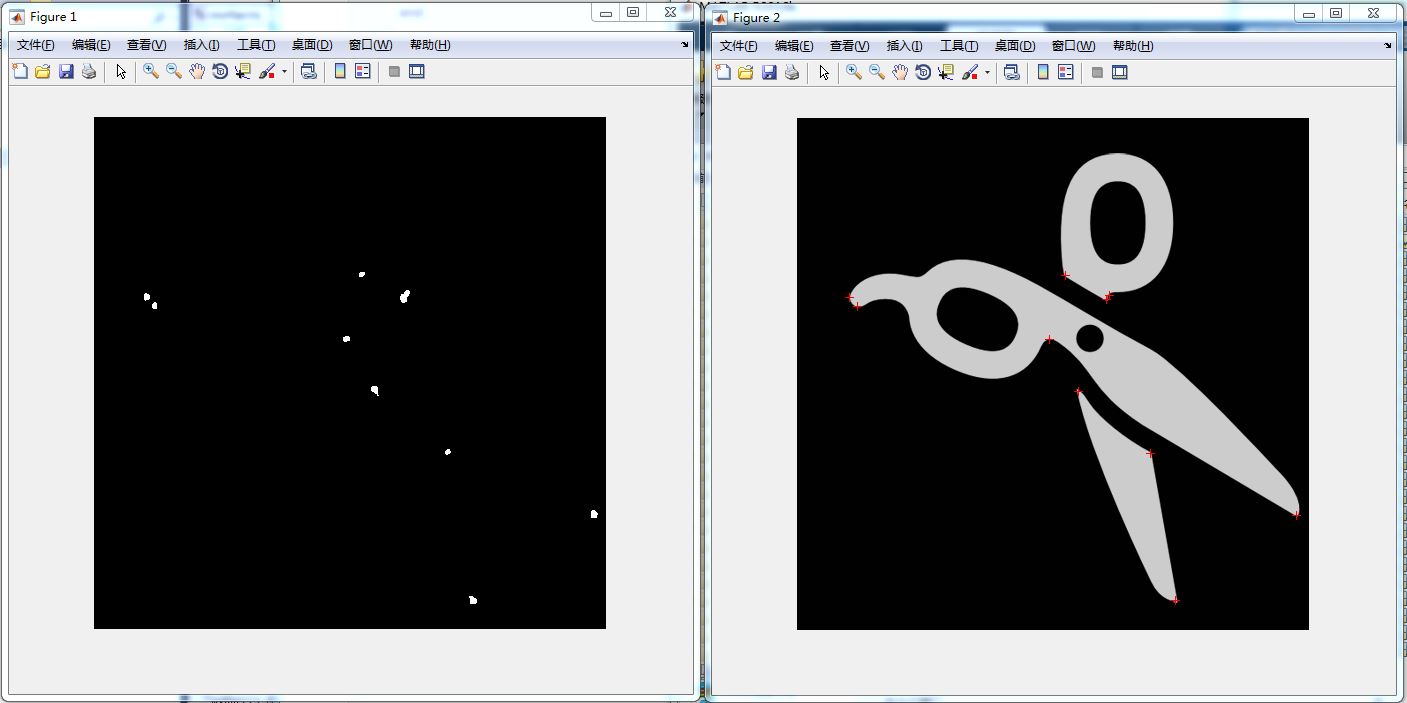
上图是matlab生成的harris角点