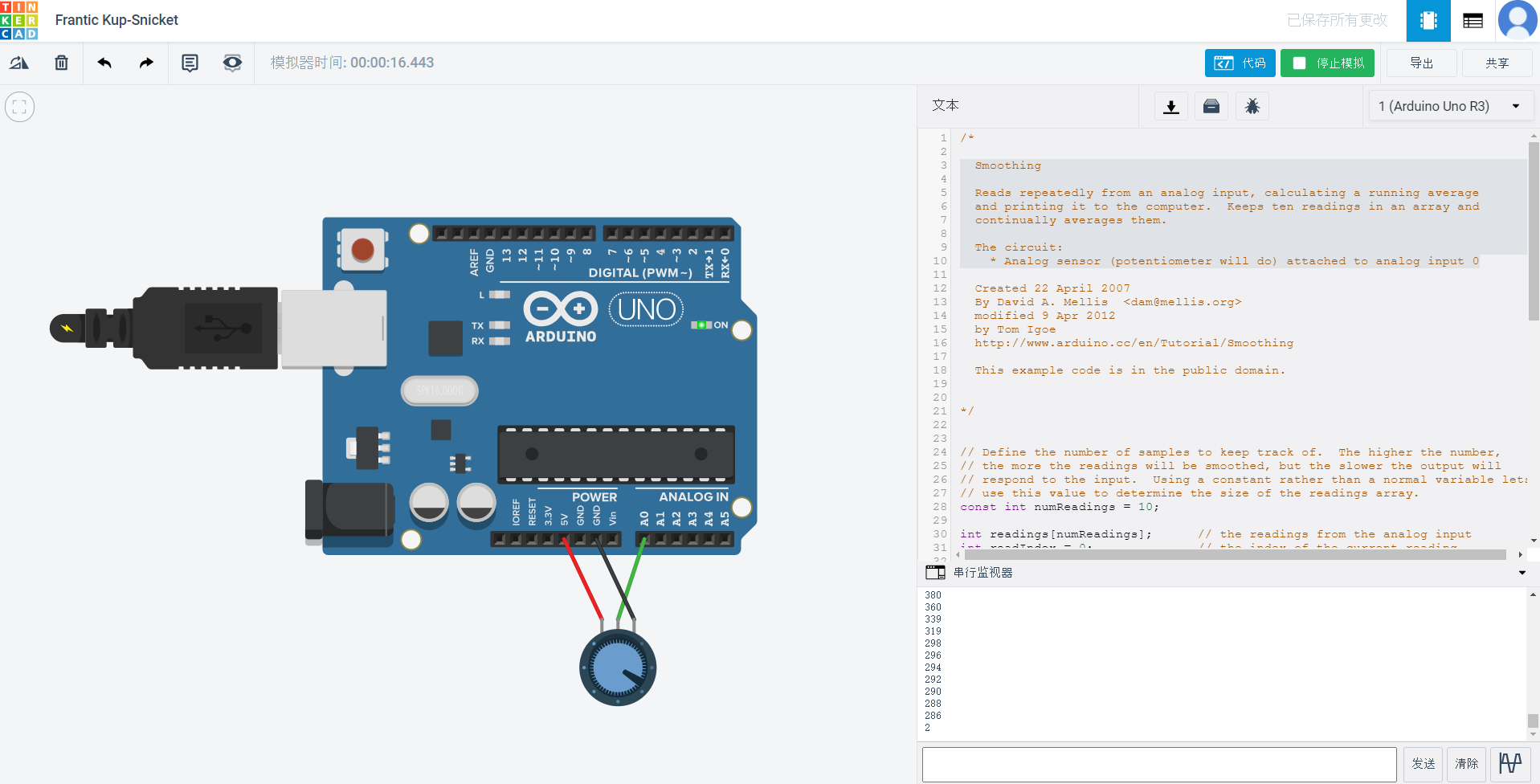
/* Smoothing 平滑处理 Reads repeatedly from an analog input, calculating a running average and printing it to the computer. Keeps ten readings in an array and continually averages them. 从模拟输入重复读取,计算运行平均值 并将其打印到计算机上。 将十个读数保持在一个数组中 不断求平均值。 The circuit: * Analog sensor (potentiometer will do) attached to analog input 0 电路: *模拟传感器(电位计可用)连接到模拟输入0 Created 22 April 2007 By David A. Mellis <dam@mellis.org> modified 9 Apr 2012 by Tom Igoe http://www.arduino.cc/en/Tutorial/Smoothing This example code is in the public domain. */ // Define the number of samples to keep track of. The higher the number, // the more the readings will be smoothed, but the slower the output will // respond to the input. Using a constant rather than a normal variable lets // use this value to determine the size of the readings array. const int numReadings = 10; int readings[numReadings]; // the readings from the analog input int readIndex = 0; // the index of the current reading int total = 0; // the running total int average = 0; // the average int inputPin = A0; void setup() { // initialize serial communication with computer: Serial.begin(9600); // initialize all the readings to 0: for (int thisReading = 0; thisReading < numReadings; thisReading++) { readings[thisReading] = 0; } } void loop() { // subtract the last reading: total = total - readings[readIndex]; // read from the sensor: readings[readIndex] = analogRead(inputPin); // add the reading to the total: total = total + readings[readIndex]; // advance to the next position in the array: readIndex = readIndex + 1; // if we're at the end of the array... if (readIndex >= numReadings) { // ...wrap around to the beginning: readIndex = 0; } // calculate the average: average = total / numReadings; // send it to the computer as ASCII digits Serial.println(average); delay(1); // delay in between reads for stability }