1.点云同步处理的类 RangeDataCollator
class RangeDataCollator { public: explicit RangeDataCollator( const std::vector<std::string>& expected_range_sensor_ids) : expected_sensor_ids_(expected_range_sensor_ids.begin(), expected_range_sensor_ids.end()) {} sensor::TimedPointCloudOriginData AddRangeData( const std::string& sensor_id, const sensor::TimedPointCloudData& timed_point_cloud_data); private: sensor::TimedPointCloudOriginData CropAndMerge(); const std::set<std::string> expected_sensor_ids_; // Store at most one message for each sensor. std::map<std::string, sensor::TimedPointCloudData> id_to_pending_data_; common::Time current_start_ = common::Time::min(); common::Time current_end_ = common::Time::min(); };
其中有四个成员函数:
生成点云的所有传感器的 sensor_ids
const std::set<std::string> expected_sensor_ids_;
修剪合并点云时的所有点云 sensor_id 和与之对应的数据
std::map<std::string, sensor::TimedPointCloudData> id_to_pending_data_;
时间撮 记录点云
common::Time current_start_ = common::Time::min();
common::Time current_end_ = common::Time::min();
2.AddRangeData
sensor::TimedPointCloudOriginData RangeDataCollator::AddRangeData( const std::string& sensor_id, const sensor::TimedPointCloudData& timed_point_cloud_data)
1.首先检测该点云数据 sensor_id 是否在期望的sensor_ids里面,否则程序停止
CHECK_NE(expected_sensor_ids_.count(sensor_id), 0);
2.当该sensor_id 已经在 id_to_pending_data_ 中
当我们有两个相同传感器的消息时,移除两个中旧的数据,但不发送电流
1>跟新current_start,current_end 时间
current_start_ = current_end_;
current_end_ = id_to_pending_data_.at(sensor_id).time;
2>修剪合并在 id_to_pending_data_ 中的数据 CropAndMerge
auto result = CropAndMerge();
3>将当前传感器数据放入 id_to_pending_data_ 中,并且返回result
id_to_pending_data_.emplace(sensor_id, timed_point_cloud_data); return result;
3.当sensor_id 不在 id_to_pending_data_ 中时
1>首先当前数据加到 id_to_pending_data_ 中,
id_to_pending_data_.emplace(sensor_id, timed_point_cloud_data);
2>使 id_to_pending_data_ 中 包含期望的所有数据
if (expected_sensor_ids_.size() != id_to_pending_data_.size()) { return {}; }
3>跟新时间
current_start_ = current_end_; // We have messages from all sensors, move forward to oldest. common::Time oldest_timestamp = common::Time::max(); for (const auto& pair : id_to_pending_data_) { oldest_timestamp = std::min(oldest_timestamp, pair.second.time); } current_end_ = oldest_timestamp;
4>修剪合并 CropAndMerge
3.CropAndMerge
sensor::TimedPointCloudOriginData RangeDataCollator::CropAndMerge()
1.定义返回对象
sensor::TimedPointCloudOriginData result{current_end_, {}, {}};
2.遍历 id_to_pending_data_ 中所有传感器的数据,其对于传感器数据处理一样
for (auto it = id_to_pending_data_.begin(); it != id_to_pending_data_.end();) { sensor::TimedPointCloudData& data = it->second; sensor::TimedPointCloud& ranges = it->second.ranges;
2>将在[current_start_,current_end_]区间内的传感器数据 下表确定出来
auto overlap_begin = ranges.begin(); while (overlap_begin < ranges.end() && data.time + common::FromSeconds((*overlap_begin)[3]) < current_start_) { ++overlap_begin; } auto overlap_end = overlap_begin; while (overlap_end < ranges.end() && data.time + common::FromSeconds((*overlap_end)[3]) <= current_end_) { ++overlap_end; }
3>复制重叠范围。
if (overlap_begin < overlap_end) { std::size_t origin_index = result.origins.size(); result.origins.push_back(data.origin); double time_correction = common::ToSeconds(data.time - current_end_); for (auto overlap_it = overlap_begin; overlap_it != overlap_end; ++overlap_it) { sensor::TimedPointCloudOriginData::RangeMeasurement point{*overlap_it, origin_index}; // current_end_ + point_time[3]_after == in_timestamp + // point_time[3]_before point.point_time[3] += time_correction; result.ranges.push_back(point); } }
涉及到: 处理了前一时刻的点云,然后将时间跟新
4>将缓冲点丢弃,直到overlap_end。
if (overlap_end == ranges.end()) { it = id_to_pending_data_.erase(it); } else if (overlap_end == ranges.begin()) { ++it; } else { data = sensor::TimedPointCloudData{ data.time, data.origin, sensor::TimedPointCloud(overlap_end, ranges.end())}; ++it; }
3.按照时间排序,并且返回结果
std::sort(result.ranges.begin(), result.ranges.end(), [](const sensor::TimedPointCloudOriginData::RangeMeasurement& a, const sensor::TimedPointCloudOriginData::RangeMeasurement& b) { return a.point_time[3] < b.point_time[3]; }); return result;
感觉cartographer处理点云数据有一帧延时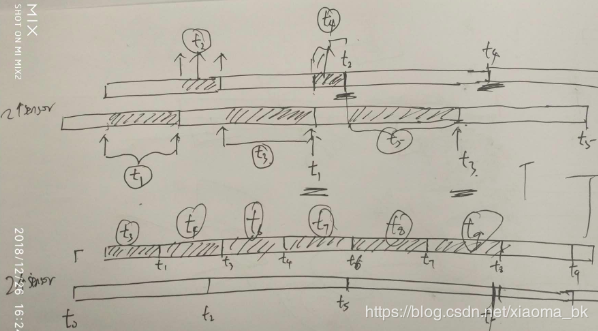
原文地址:https://blog.csdn.net/xiaoma_bk/article/details/85261422