SURF(Speeded-Up Robust Features) 是对 SIFT 得改进,相对于 SIFT,SURF 利用积分图像与盒函数模拟 DoG,提升了计算速度;同时,使用了一种不用于 SIFT 的特征描述方案。
在 SIFT 中,检测尺度空间极值使用了 DoG 响应,SURF 做了如下改进:
1)首先求原图像的积分图像,使用积分图像可以求任意尺度盒函数(Box Filter)响应;
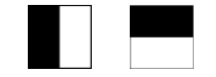
2)使用 Box Fitler 代替 DoG,下图给出了垂直方向与xy方向的 Box Filter,使用积分图像求任意尺寸响应时间都是固定的;

3)在  空间寻找极值作为候选特征点,定义 Hessian 矩阵
空间寻找极值作为候选特征点,定义 Hessian 矩阵  ,其中,G 为高斯函数,I 为图像函数;
,其中,G 为高斯函数,I 为图像函数;
剔除 Det(H) 小于某固定值的候选特征点,得到较好的极值点;
4)使用小波函数计算特征点附近响应,该响应仍然可在积分图像上计算;然后以 60 度为步长在圆形上滑动,求每个窗口响应和并将响应和最大方向作为主方向;
5)将特征点区域分为 4 * 4 小区域,在小区域内再次应用小波函数,并分别求出响应和,可构成向量  ,最终构成 4 * 4 * 4 = 64 维特征向量;
,最终构成 4 * 4 * 4 = 64 维特征向量;
一种扩展方式是区分 dx,dy 方向,分别统计 dy > 0 时对应的 dx 求和,dy < 0 时对应的 dx 求和...,这样将 v 扩展为 8 维向量,最终形成 4 * 4 * 8 = 128 维特征向量;
opencv 提供了 SURF 实现,其构造函数如下:
SURF(double hessianThreshold, int nOctaves=4, int nOctaveLayers=2, bool extended=true, bool upright=false);
hessianThreshold:当候选特征点的 Hessian 矩阵行列式值小于该值时,忽略该候选特征点;
nOctaves:表示高斯金字塔层数,当层数越多时,可检测到更粗的特征点;
nOctaveLayers:检测尺度空间上极值使用层数为 nOctaveLayers + 3;
extended:是否使用扩展特征描述,默认特征点描述向量为64维,扩展特征点描述向量为128维;
upright:当特征点方向不改变时,在描述特征点时可不计算特征点主方向;
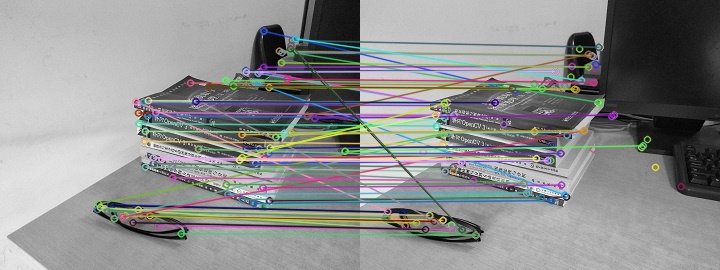
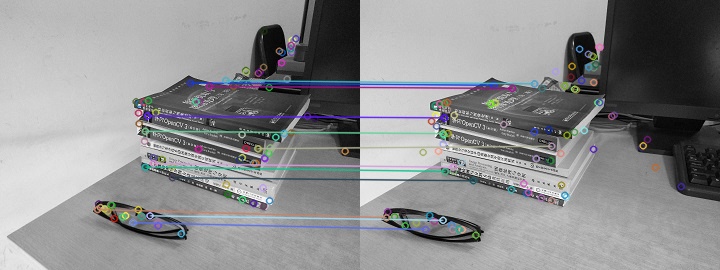
SURF 特征匹配代码与 SIFT 基本一致,如下:
1 cv::Mat img1 = cv::imread("a.jpg", cv::IMREAD_GRAYSCALE); 2 cv::Mat img2 = cv::imread("b.jpg", cv::IMREAD_GRAYSCALE); 3 4 cv::SurfFeatureDetector detector(2000); 5 std::vector<cv::KeyPoint> keypoints1, keypoints2; 6 cv::Mat descriptors1, descriptors2; 7 detector.operator()(img1, cv::noArray(), keypoints1, descriptors1); 8 detector.operator()(img2, cv::noArray(), keypoints2, descriptors2); 9 10 cv::BFMatcher matcher(cv::NORM_L2); 11 std::vector<DMatch> matches; 12 matcher.match(descriptors1, descriptors2, matches); 13 14 cv::Mat img_matches; 15 cv::drawMatches(img1, keypoints1, img2, keypoints2, matches, img_matches); 16 cv::imwrite("c.jpg", img_matches); 17 18 double min_dist = 100; 19 20 for (int i = 0; i < matches.size(); i++) 21 { 22 double dist = matches[i].distance; 23 if (dist < min_dist) min_dist = dist; 24 } 25 26 27 // Draw only "good" matches (i.e. whose distance is less than 2*min_dist, 28 // or a small arbitary value ( 0.02 ) 29 std::vector< DMatch > good_matches; 30 for (int i = 0; i < matches.size(); i++) 31 { 32 if (matches[i].distance <= max(2 * min_dist, 0.02)) 33 { 34 good_matches.push_back(matches[i]); 35 } 36 } 37 38 cv::drawMatches(img1, keypoints1, img2, keypoints2, good_matches, img_matches); 39 cv::imwrite("d.jpg", img_matches);
参考资料 SURF: Speeded Up Robust Features Herbert Bay & Tinne Tuylelaars & Luc Van Gool
Learning OpenCV 3 Adrian Kaehler & Gary Bradski