一 Laplace 算子
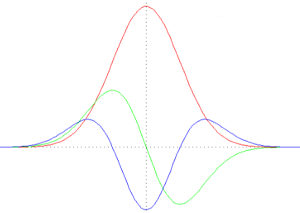
使用一阶微分算子可以检测图像边缘。对于剧烈变化的图像边缘,一阶微分效果比较理想。但对于缓慢变化的图像边缘,通过对二阶微分并寻找过零点可以很精确的定位边缘中心。二阶微分即为 Laplace 算子,在 "图像边缘检测" 中进行的推导。以一维图像为例,下图给出边缘的一阶与二阶运算结果:


红色区曲线表示原始边缘,绿色曲线表示一阶微分结果,蓝色区域表示二级微分结果。
如何使用 Laplace 算子检测到图像边缘呢?其基本方法如下:
1)使用 Laplace 算子与图像卷积;
2)在邻域(3*3, 5*5, 7*7等)中寻找卷积后最大值与最小值;
3)当最大值大于0,最小值小于0,最大值大于某固定阈值,最小值小于某固定阈值的负值时认为找到边缘(避免噪声干扰);
二 Laplacian of Gaussian(LoG)
Laplace 算子检测边缘同时也检测到噪声,可以首先使用 Gaussian Kernel 对图像去噪,然后在去噪后图像上应用 Laplace 算子。
由于线性运算可结合性质,有如下结论:
 ;
;
以下给出证明:
 ;
;
 。
。
根据以上结论,由于 Gaussian Kernel 在卷积运算前已知且相对固定,可以先对求解 LoG,然后再使用 LoG 对图像卷积。
 ;
;
 ;
;
 ;
;
 。
。
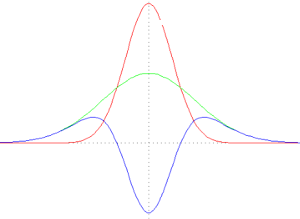
上图给出一维高斯函数的一阶微分(绿色)与二阶微分(蓝色)。
通过离散化近似处理,可以得到 LoG 核模板(5*5), ,使用该模板检测图像边缘,步骤如下:
,使用该模板检测图像边缘,步骤如下:
1)计算 LoG 核;
2)使用 LoG 核与图像卷积;
3)在5*5邻域中寻找卷积后最大值与最小值;
4)当最大值大于0,最小值小于0,最大值大于某固定阈值,最小值小于某固定阈值的负值时认为找到边缘;
三 Difference of Gaussian(DoG)
使用 DoG 可以得到与 LoG 近似的效果,步骤如下:
1)使用宽度  高斯核与原图像卷积
高斯核与原图像卷积
 ;
;
2)使用宽度  高斯核与原图像卷积
高斯核与原图像卷积
 ;
;
3)求两卷积之差
 ;
;
 可以提前计算出来
可以提前计算出来  ;
;
上图给出两个不同宽度的一维高斯函数的一阶微分(红色与绿色)与DoG(蓝色),观察发现 DoG 与 LoG 形状基本一致,所有可以使用 DoG 求二阶过零点。
四 Blob检测
使用 LoG 可以检测函数过零点,以一维图像为例,如下图:

对不同尺寸Blob块使用 LoG ,可得如下结果:
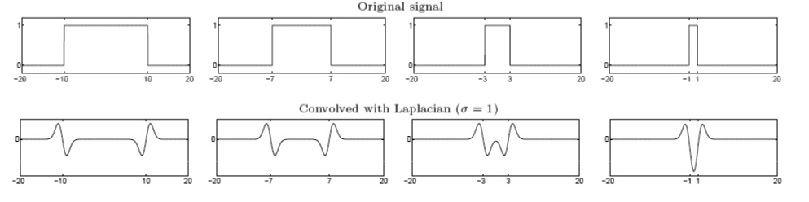
由上图可知,对于不同尺寸Blob块,二阶微分响应不同。当Gaussian函数尺度与Blob块直径基本一致时,产生最大响应。
对于一个固定尺寸Blob块,使用不同尺度Gaussian函数时,响应如下:
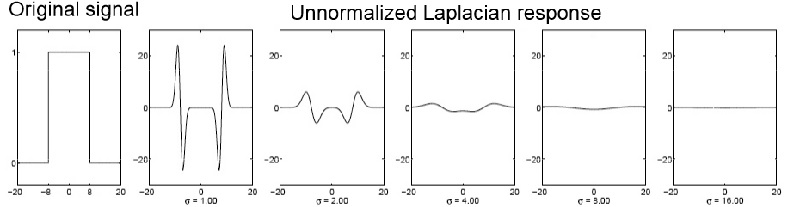
Laplacian 响应随着  增大而减小,需要对对响应值进行归一化处理。
增大而减小,需要对对响应值进行归一化处理。
高斯函数的一阶微分对理想阶跃边缘的响应随着  增大而降低,在一阶微分卷积前乘以
增大而降低,在一阶微分卷积前乘以  以归一化响应,在二阶微分卷积前乘以
以归一化响应,在二阶微分卷积前乘以  以归一化响应。
以归一化响应。
以下给出二维归一化 LoG 表达式: 。
。
使用不同尺度归一化Gassian二阶微分,响应如下:

通过以上图像可知,当Gassian函数尺度与Blob块直径基本一致时,产生最大响应。
通过以上观察,可得到Blob块检测方法:
1)使用不同尺度Gassian函数的归一化二阶梯度分别于图像卷积;
2)合并不同尺度下卷积图像形成三维图像;
3)在三维图像中寻找局部极大值,该极大值即为检测到的Blob块,其中Blob块中心由所在图像坐标决定,Blob块半径由所在尺度决定,其值为  。
。
五 Blob 特征点描述
当检测到特征点后,使用自相关函数可以描述 Blob 特征点形状特征:
 ;
;
令  ,在 uv 平面上可以得到一个椭圆,如下:
,在 uv 平面上可以得到一个椭圆,如下:

观察椭圆可知,在短轴方向上 Blob 特征点变化速度最快,在长轴方向上变化最慢。同时,自相关矩阵描述了特征点形状及旋转关系。
当采集图像发生了射影变换(旋转,拉伸),其 Blob 特征点的自相关矩阵所描述的椭圆也会发生 旋转,拉伸变换。在描述 Blob 特征点前,首先对其进行拉伸变化将椭圆转换为正圆,这样方便对特征点进行统一描述。
以上操作使特征点具有相同的拉伸变换,但仍旧需要使特征点具有统一的旋转角度,使用梯度方向直方图可以估计特征点旋转。具体如下:
1)使用特征点周边固定区域内的梯度方向形成方向直方图;
2)使用直方图中最大 bin 作为特征点方向(零点方向);
3)在 Blob 区域内(正圆,去除拉伸)统计方向直方图,该直方图可作为特征描述符。
参考: https://www.cs.unc.edu/~lazebnik/spring11/lec08_blob.pdf