Rich feature hierarchies for accurate object detection and semantic segmentation
Ross Girshick Jeff Donahue Trevor Darrell Jitendra Malik
UC Berkeley
丰富多级特征用于精准对象检测和语义分割
------------------------------------------------------------------------------------鉴于前一篇篇幅太长,此处采用缩略翻译
摘要:
开头大意就是说在权威(canonical)的PASCAL VOC数据集上,过去的人们都是搞一坨坨特征,然后再进行图像上下文分析(也就是空间几何结构,类似DPM),现在我们用CNNs达到了53.3%准确率。文章关键信息:(1)使用cnn对图像区域(region)进行检测和分割(2)因为标注好的训练数据太少,我们基于不同领域细调(domain-soecific fine-tuning)得到了很好提升效果。这种CNN+Region的组合,就是R-CNN。我们还和一种Overfeat方法进行了比较,他也是一种基于CNN的方法,但我们比他效果牛多了,测试数据集ILSVRC2013,200个类别。源码在这儿:http://www.cs.berkeley.edu/˜rbg/rcnn
1介绍:
大家都认同,特征真的TM的重要,过去人们搞了一堆堆特征,HOG啊,sift啊,balabala的。。。但图像对象检测的效果自从2012之后就提升很慢。
SIFT、HOG都是基于块直方图统计,某种意义上和我们视觉皮层规律相符合。但我们整个看东西的过程从皮层到大脑还会经历各种神经系统,中间可能产生的许多有用分级特征(hierarchical features)。
Fukushima提出过一种类似生物学的模型,Lecun提出过随机梯度下降法+反向传播的CNN架构。CNN在1990年代很多人使用,但后来因为SVM就冷下来。直到2012年的Alexnet出来才又火了(参考上一篇翻译)。
CNN分类火了之后,大家各种兴奋,开始讨论怎么把这个模型用到VOC数据集检测问题上呢???
我们来解答这个问题!本文展示了CNN用在检测上的效果,比HOG之流的方法效果牛B多了。主要也就两个问题:1、如何使用深度神经网络做检测?2、如何用小规模标注的数据集来训练大型神经网络模型?
检测(detection)和分类(classification)不同的就是检测需要定位(localization)(定位就是找一个点,检测就是再加上bindingbox),我们把定位看成一个回归问题(也就是特征和响应值的拟合)。其他也有人这么做,但效果很烂(我们的平均准确率(map)58.5%,他们的30.5%)。另外一种方法就是使用一个滑动窗口检测。过去CNN其实在检测上已经用了20多年,但结构都很简单,两个卷积层的样子,主要是行人,人脸检测,层数少的原因是想保留下高清图像细节。我们的有5个卷积层,有很大的感受野(receptive field)195*195和大步长32(感受野是个什么玩意,看这个:http://blog.sciencenet.cn/blog-597740-979117..html),这使得基于滑动窗口来进行精准定位变得很难。
而我们是采用产生区域的方法,产生区域的方法在检测和分割上都很有用。测试的时候我们每张图产生2000个区域,每个区域都用CNN提取特征,后用SVM分类。输入区域(region)的时候,我们会调整成固定大小。图1是整体架构和结果。
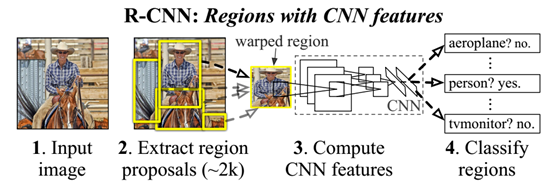
图1:对象检测整体框架:1、输入图像。2、提取2000个region。3、计算每隔区域特征。4、线性svm分类,准确率53.7%。不用CNN特征,而是用词袋模型,只有31.4%,DPM是3.4%。在200个类别的ILSVRC2013数据集上我们的准确率31.4%,overfeat24.3%
另外刚刚第二个问题:数据不够多。解决这个问题办法是:无监督预训练+细调。明白点说就是:在Imagenet上训练CNN,然后在VOC上细调。这样的效果是很好的,例子就是好多人直接用Alexnet提取特征然后做好多其他研究,什么场景识别啊,效果都不错。
我们训练速度也很高效,类别相关的计算项目就是一个小型的矩阵向量相乘,和非极大值抑制(Non-maximum suppression,http://blog.csdn.net/pb09013037/article/details/45477591),另外,我们的特征维数比起之前的要下降两个数量级(two order of magnitude)
我们发现加一个Bindingbox回归算法可以很好地降低错误率
我们发现我们的方法用在分割也很好,VOC2011上准确率47.9%
2 使用R-CNN进行对象检测
方法简单概括就是:region提取 + CNN 特征提取 + SVM分类。
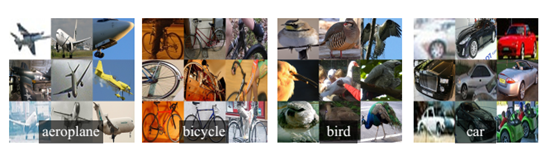
图2:VOC2007训练集图片打包样例
2.1 模块设计
区域提取:现今有很多区域提取算法:objectness、selective search、CPMC等等,由于R-CNN对于区域算法并不挑,所以为了好对比,我们使用selecttive search。
特征提取:直接使用Alexnet,五卷积和三全连接
我们会把region都resize到Alexnet要求的固定大小,但因为要平移裁剪,我们把region扩张16个像素。
2.2. 测试
把刚才的过程又复述一遍……一堆废话之后开始讨论下我们的算法时间。
13s/image on a GPU
53s/image on a CPU
一张图特征矩阵2000*4096,然后表述一大堆,意思就是我们的这个特征已经很小了,还适用于所有类别,还很省内存。
2.3. 训练
有监督预训练
这一步就是使用caffe+alexnet,我们的准确率稍差,因为训练集被我们精简了。
基于领域的精调(Domain-specific fine-tuning)
为了检测,我们在模型基础上调整,替换最后1000维输出变成我们的N+1维的输出,初始值随机,N是类别数目,1是背景。
然后输入区域作为图像来调整模型,还是用随机梯度下降(SGD),学习速率0.001(以前的1/10), 同一批(batch)训练样本128个包括96个正样本,32个负样本
对象类别分类器
怎样的算正样本,我们选择和标注结果(groundtruth)overlap 0.3以下的作为负样本。这是通过验证集严格筛选的,从{0,0.1,0.2,0.3……0.5}中尝试一遍会发现,选择0.5作为阈值,准确率下降5个百分点,选择0作为阈值,平均准确率下降4个百分点。注:正样本是严格groundtruth。
而我们的SVM分类器是在每个类别上优化的,使用了Hard-negative mining 技术,只需要遍历一遍所有样本就可以很快收敛。
附录B会讨论下,在SVM分类器和训练神经网络中,正负样本的定义是不同的。另外讨论为什么要用SVM替换softmax。
2.4. PASCAL VOC 2010-12的结果
废话不说,看结果。在12数据集上我们贴出来使用和不使用包围盒回归的结果(with
and without bounding-box regression)。

表 1: VOC2010平均检测准确率 (%)
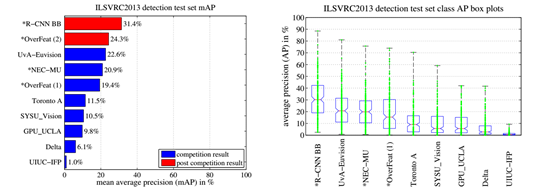
图 3: (左)
ILSVRC2013 平均检测准确率,(右) 每种方法两百个包围盒的箱形图(Box-plot)。没有 OverFeat的箱形图,因为每个类别结果没有公开,红线代表平均AP,盒底部和上部表示25%和75%The
red
line marks the median AP, the box bottom and top are the 25th and 75th
percentiles. 而上方和下方是最大最小AP. AP都画成绿点。
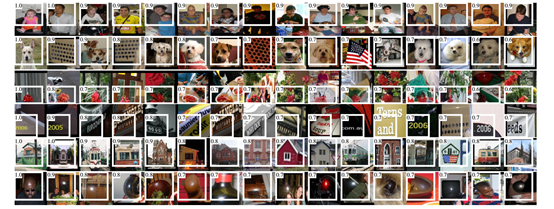
3. 可视化,剥离本质,和错误模型
3.1 可视化学习特征
第一层的特征很容易可视化,他们抓取了边缘和对比强烈的颜色,而如果要理解更上层就比较困难。Zeiler and Fergus (第0篇翻译中)使用了反卷积操作,而我们使用一种更加简便的方法。我们计算出region的响应度,然后进行排序,大概有1000万个,我们把这些区域进行最大值抑制然后显示出来。