v2第二次复习:
基本上看第一次总结,是正确的,还有一个补充就是,如果状态的判定又涉及到多个字段的话,那么用状态模式的附带的好处就是把状态用单独key表示出来了。就是每个状态的派生类。这样更简洁。
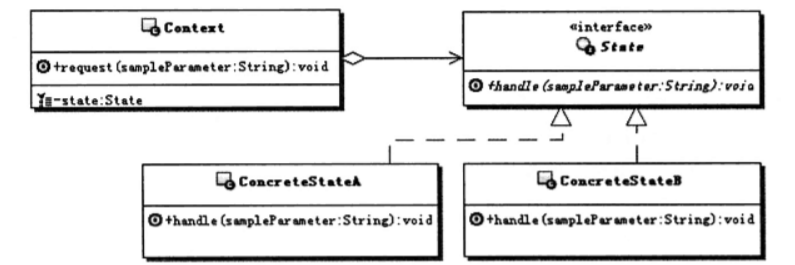
另外状态类,都是包含行为的,而行为一般是会对状态类的母体做修改。所以状态类的方法一般会传递this过去。
第一次学习
官方的一句话:允许对象在内部状态发生改变时改变它的行为,对象看起来好像修改了它的类。
自己的一句话:状态不同,一系列动作不同,如各种机器,贩卖机,电梯,mp3等,有多个状态,并且有多个按钮。它突出的是状态会增加,或减少的场景。
策略模式是一个最底层的模式,很多模式都包含策略模式。
状态模式是有状态的,它突出的是状态会增加,或减少的策略模式,可以说策略是基础模式,状态是有状态的策略模式。
使用场景,如果状态多。并且动作也不只一个,如果加新状态 if else 不直观,要到内部修改。所以用状态模式。
//没太看懂,恩,直接写例子吧。根据这个模式的说明,大量增加状态时,会需要状态模式,自己看看是否会迭代出状态模式
//v1:建一个机器人,有3个状态,开心,平静,愤怒。 有2个行为,吃饭和睡觉。
//v2:试图增加状态,并符合开闭状态。
//看网上很多例子。各不一样。但是根本意思是一样。
//如这里,机器人有不同的情绪,那么吃饭的结果完全不同。如果情绪更丰厚。那么吃饭的结果就太多了。
//干脆把吃饭作为一个类,那么有高兴吃饭类,平静吃饭类。生气吃饭类。等等,想加什么加什么。当然必须把机器人传递给吃饭类,因为毕竟吃饭类是要知道谁吃饭吧。
//个人总结,除非非常符合情景,否则使用的也不多。因为会宁愿修改代码也不会去实现状态模式。
// 有一点像命令模式,虽然目的不同,一个为了存储,一个为了变化。但是根本手段是一致。把方法提出来放到类中。总的指导思想是一致的。
public class MyState
{
public void Run()
{
Robot robot=new Robot("v1");
robot.changeState(0);
robot.eat();
robot.sleep();
robot.changeState(2);
robot.eat();
}
public void Runv2()
{
Robotv2 robot2=new Robotv2("v2");
happy happystats=new happy();
Calm calmstats=new Calm();
robot2.eat();
robot2.sleep();
calmstats.eat(robot2);
}
//region v1 ,存在增加状态时,必须需改函数内部,违反开闭原则。
public class Robot
{
private int MState=0;//0:calm 1:happy 2:angry.
private String mName;
public Robot(String name)
{
mName=name;
}
public void changeState(int ss)
{
MState=ss;
}
public void eat()
{
if(MState==0)
{
LSComponentsHelper.LS_Log.Log_INFO(mName+"eat half");
}
else if(MState==1)
{
LSComponentsHelper.LS_Log.Log_INFO(mName+"eat all");
}
else if(MState==2)
{
LSComponentsHelper.LS_Log.Log_INFO(mName+"eat nothing");
}
// else if(MState==3)
// {
// LSComponentsHelper.LS_Log.Log_INFO(mName+"eat nothing");
// }
}
public void sleep()
{
if(MState==0)
{
LSComponentsHelper.LS_Log.Log_INFO(mName+"sleep slowly");
}
else if(MState==1)
{
LSComponentsHelper.LS_Log.Log_INFO(mName+"sleep fast");
}
else if(MState==2)
{
LSComponentsHelper.LS_Log.Log_INFO(mName+"sleep ,hardly");
}
// else if(MState==3)
// {
// LSComponentsHelper.LS_Log.Log_INFO(mName+"eat nothing");
// }
}
}
//endregion
//region 常见的对修改关闭的手段,就是把要修改的部分放到一个类中,并让他们继承某个接口。那么原来需要修改的地方。只要使用接口就可以。变化可以由增加新类来实现。
//把增加的内部判断,改为了到外部增加新类
public class Robotv2
{
private int MState=0;//0:calm 1:happy 2:angry.
private String mName;
public Robotv2(String name)
{
mName=name;
}
public void changeState(int ss)
{
MState=ss;
}
public void eat()
{
MState=0;
LSComponentsHelper.LS_Log.Log_INFO(mName+"start eat");
MState=1;//初始状态,吃完东西会变开心。
}
public void sleep()
{
MState=0;
LSComponentsHelper.LS_Log.Log_INFO(mName+"start sleep");
MState=2;//初始状态,睡觉,会变不开心.
}
}
public interface IAction
{
public void eat(Robotv2 robotv2);
public void sleep(Robotv2 robotv2);
}
public class happy implements IAction
{
@Override
public void eat(Robotv2 robotv2)
{
LSComponentsHelper.LS_Log.Log_INFO(robotv2.mName+"eat all");
robotv2.changeState(2);
}
@Override
public void sleep(Robotv2 robotv2)
{
LSComponentsHelper.LS_Log.Log_INFO(robotv2.mName+"sleep fast");
}
}
public class Calm implements IAction
{
@Override
public void eat(Robotv2 robotv2)
{
LSComponentsHelper.LS_Log.Log_INFO(robotv2.mName+"eat half");
robotv2.changeState(1);
}
@Override
public void sleep(Robotv2 robotv2)
{
LSComponentsHelper.LS_Log.Log_INFO(robotv2.mName+"sleep slowly");
}
}
//endregion
}