Eigen中 Isometry3d与 matrix的区别
1、Identity()
Eigen::Isometry3d A;
A.Identity();
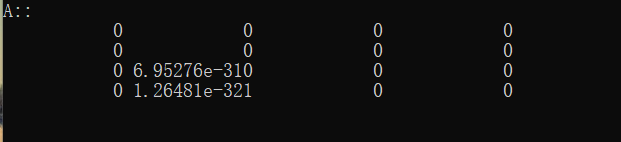
Identity()初始化的结果 并不是一个4*4的单位矩阵;
正确做法:
Eigen::Isometry3d A= Eigen::Isometry3d::Identity(); //Matrix<double, 4, 4> A = Matrix<double, 4, 4>::Identity(); std::cout << "A::" << " "; std::cout << A.matrix() << " ";

得到一个4*4的单位矩阵。