实现思路如下:
Step1:大文件的内存映射,多线程数据读取,加快读取速度。
Step2:点云数据预处理(抽希、去噪点)。
Step3:Step2处理后数据使用kdtree进行离散点排序。
Step4:遍历点云数据,对于点i,利用kdtree半径检索,得到每个点的邻近点集,计算点集的重心;判断该i点距离其邻近点集重心的距离,距离作为阈值,进行判断是否在边界。
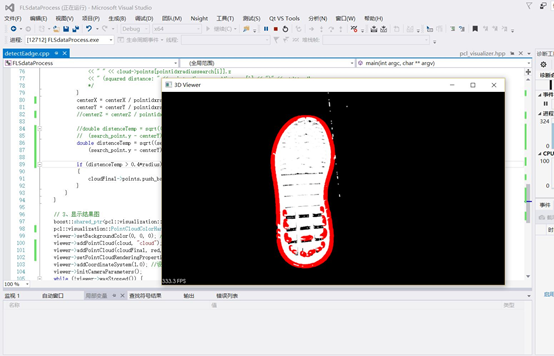
图1 效果图
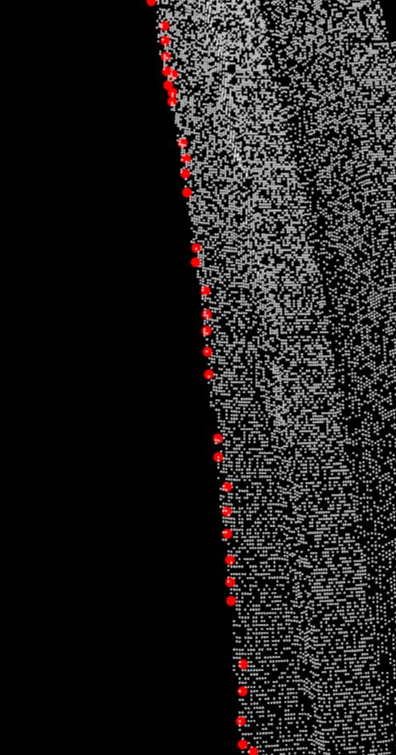
图2 细节
核心代码:
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree; kdtree.setInputCloud(cloud_filtered); PointT search_point; //存储搜索点 // neighbors within radius search 根据搜索半径搜索 std::vector<int> pointidxradiussearch; std::vector<float> pointradiussquareddistance; float radius = 10; //256.0f * rand() / (rand_max + 1.0f); for (size_t i = 0; i < cloud_filtered->points.size(); i++) { search_point = cloud_filtered->points[i]; if (kdtree.radiusSearch(search_point, radius, pointidxradiussearch, pointradiussquareddistance) > 0) { float centerX = 0; float centerY = 0; float centerZ = 0; for (size_t i = 0; i < pointidxradiussearch.size(); ++i) { centerX += cloud_filtered->points[pointidxradiussearch[i]].x; centerY += cloud_filtered->points[pointidxradiussearch[i]].y; //centerZ += cloud_filtered->points[pointidxradiussearch[i]].z; /* std::cout << " " << cloud->points[pointidxradiussearch[i]].x << " " << cloud->points[pointidxradiussearch[i]].y << " " << cloud->points[pointidxradiussearch[i]].z << " (squared distance: " << pointradiussquareddistance[i] << ")" << std::endl; */ } centerX = centerX / pointidxradiussearch.size(); centerY = centerY / pointidxradiussearch.size(); //centerZ = centerZ / pointidxradiussearch.size(); //double distenceTemp = sqrt((search_point.x - centerX)*(search_point.x - centerX) + // (search_point.y - centerY)*(search_point.y - centerY) + (search_point.z - centerZ)*(search_point.z - centerZ)); double distenceTemp = sqrt((search_point.x - centerX)*(search_point.x - centerX) + (search_point.y - centerY)*(search_point.y - centerY)); if (distenceTemp > 0.4*radius) { cloudFinal->points.push_back(search_point); } } }