1、简介
对于实时性、 周期性的消息, 使用topic来传输是
最佳的选择。 topic是一种点对点的单向通信方式, 这里的“点”指的是node, 也就是说node之
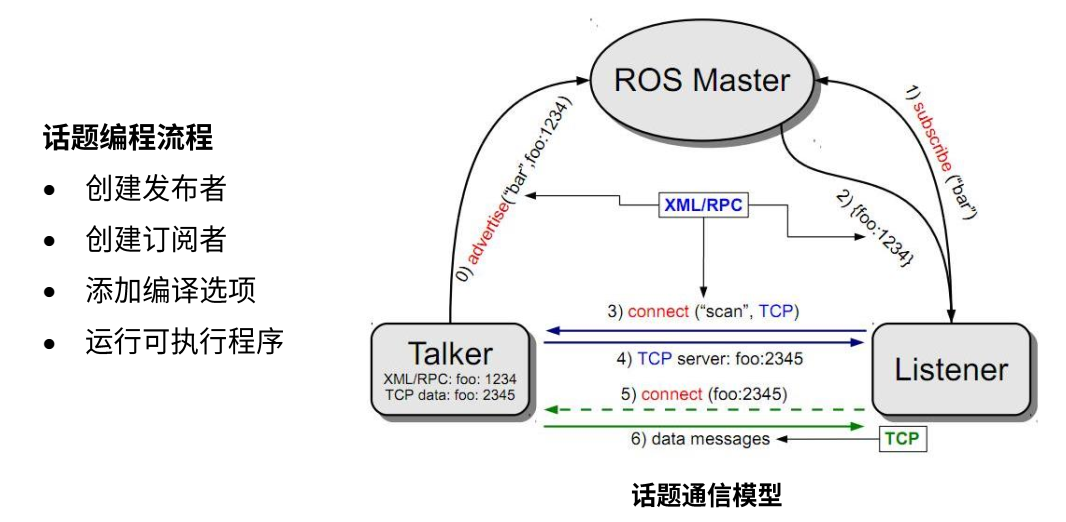
间可以通过topic方式来传递信息。 topic要经历下面几步的初始化过程: 首先, publisher节点
和subscriber节点都要到节点管理器进行注册, 然后publisher会发布topic, subscriber在
master的指挥下会订阅该topic, 从而建立起sub-pub之间的通信。 注意整个过程是单向的。 其
结构示意图如下:
总结三点:
1. topic通信方式是异步的, 发送时调用publish()方法, 发送完成立即返回, 不用等待反
馈。
2. subscriber通过回调函数的方式来处理消息。
3. topic可以同时有多个subscribers, 也可以同时有多个publishers。 ROS中这样的例子
有: /rosout、 /tf等等。

/** * 该例程将发布chatter话题,消息类型String */ #include <sstream> #include "ros/ros.h" #include "std_msgs/String.h" int main(int argc, char **argv) { // ROS节点初始化 ros::init(argc, argv, "talker"); // 创建节点句柄 ros::NodeHandle n; // 创建一个Publisher,发布名为chatter的topic,消息类型为std_msgs::String ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000); // 设置循环的频率 ros::Rate loop_rate(10); int count = 0; while (ros::ok()) { // 初始化std_msgs::String类型的消息 std_msgs::String msg; std::stringstream ss; ss << "hello world " << count; msg.data = ss.str(); // 发布消息 ROS_INFO("%s", msg.data.c_str()); chatter_pub.publish(msg); // 循环等待回调函数 ros::spinOnce(); // 按照循环频率延时 loop_rate.sleep(); ++count; } return 0; }
/** * 该例程将订阅chatter话题,消息类型String */ #include "ros/ros.h" #include "std_msgs/String.h" // 接收到订阅的消息后,会进入消息回调函数 void chatterCallback(const std_msgs::String::ConstPtr& msg) { // 将接收到的消息打印出来 ROS_INFO("I heard: [%s]", msg->data.c_str()); } int main(int argc, char **argv) { // 初始化ROS节点 ros::init(argc, argv, "listener"); // 创建节点句柄 ros::NodeHandle n; // 创建一个Subscriber,订阅名为chatter的topic,注册回调函数chatterCallback ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback); // 循环等待回调函数 ros::spin(); return 0; }

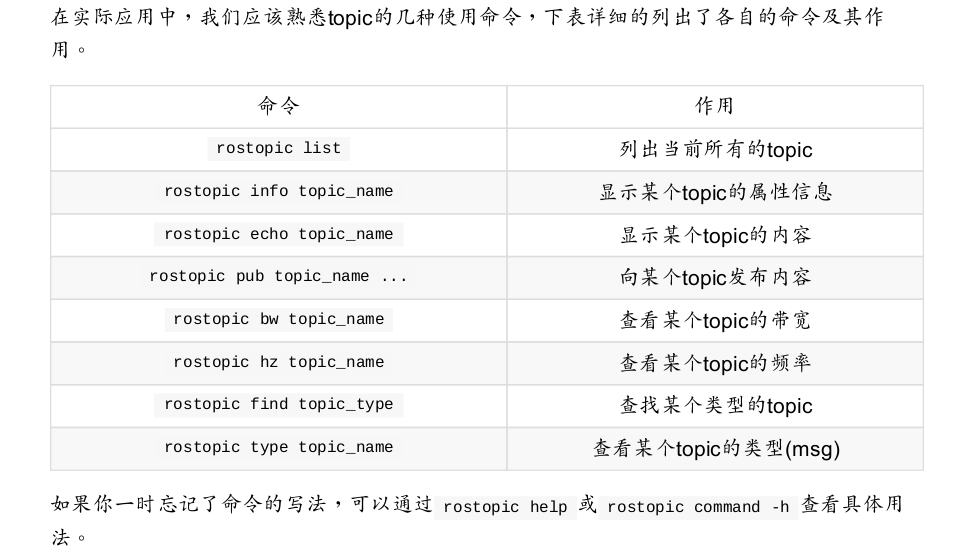
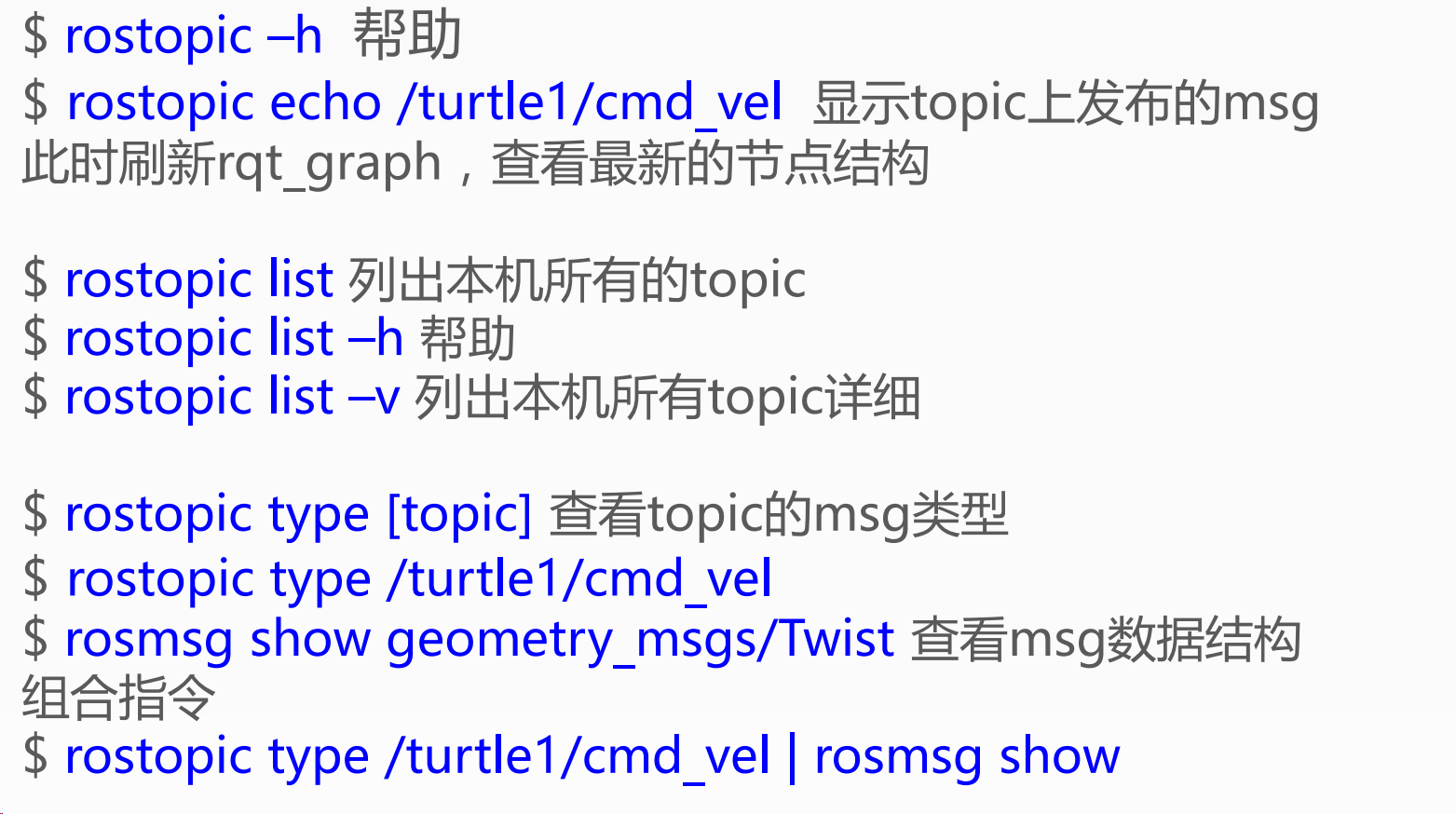
用指令发布/订阅topic消息msg 

一、Publisher节点 /*"ros/ros.h"里面包含了ROS系统内最常用的一些头文件,包含此文件,便可以使用ROS的核心功能。*/ #include "ros/ros.h" /*"std_msgs/String"是由std_msgs包自动生成的头文件,定义了String信息类型,包含此文件,我们就可以使用String类型*/ #include "std_msgs/String.h" #include <sstream> /*** This tutorial demonstrates simple sending of messages over the ROS system. */ int main(int argc, char **argv) { /** * ros::init()函数需要两个系统命令行参数argc和argv, * 由此可以执行命令行传来的任何ROS参数和节点的重命名 * 第三个参数是节点的名字, * 注意这里只能使用基本命名, * 即名字里不能含有'/' * 在使用ROS的其他部分之前,你必须调用ros::init() **/ ros::init(argc, argv, "talker"); /** * NodeHandle 是节点同ROS系统交流的主要接口 * NodeHandle 在构造的时候会完整地初始化本节点 * NodeHandle 析构的时候会关闭此节点 */ ros::NodeHandle n; /** * 我们通过advertise() 函数指定我们如何在给定的topic上发布信息 * 它会触发对ROS master的调用,master会记录话题发布者和订阅者 * 在advertise()函数执行之后,master会通知每一个订阅此话题的节点 * 两节点间由此可以建立直接的联系 * advertise()会返回一个Publisher对象,使用这个对象的publish方法我们就可以在此话题上发布信息 * 当返回的Publisher对象的所有引用都被销毁的时候,本节点将不再是该话题的发布者 * 此函数是一个带模板的函数,需要传入具体的类型进行实例化 * 传入的类型就是要发布的信息的类型,在这里是String * 第一个参数是话题名称 * 第二个参数是信息队列的长度,相当于信息的一个缓冲区 * 在我们发布信息的速度大于处理信息的速度时 * 信息会被缓存在先进先出的信息队列里 */ ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000); /** * Rate loop_rate()构造了一个Rate类的对象 * 用来指定我们发布信息的频率,单位为hz,即每秒多少次 * 在我们调用Rate对象的sleep()方法之前,信息发布的频率不会发生变化 **/ ros::Rate loop_rate(10); /** * 一个记录我们发布的信息数量的计数器 * 它用来为每条信息产生不一样的字符串 * 如'1 message','2 message'这样 */ int count = 0; /** * roscpp默认会构造一个咱SIGINT的处理器来处理系统信号 * 当出现以下情况之一的时候ros:ok()会返回false: * 1.接受到了一个SIGINT信号(Ctrl-C) * 2.在程序中调用了ros::shutdown() * 3.所有的ros::NodeHandle对象及引用都被销毁 **/ while (ros::ok()) { /** * 这是一个message对象,我们向其中填入数据,然后可以发布它 */ std_msgs::String msg; /** * 我们发布的信息的格式为"hello world 1/2/3..." */ std::stringstream ss; ss << "hello world " << count; msg.data = ss.str(); /** * ROS_INFO是对ROS系统对printf/cout的替代 */ ROS_INFO("%s", msg.data.c_str()); /** * publish()函数用来发布信息 * 信息类型必须为前一步实例化advertised()时使用的模板参数的类型 * 这里为String */ chatter_pub.publish(msg); /** * 在这个简单的应用中,我们没有使用任何回调函数 * 所以ros::spinOnce()的调用不是必须的 * 但是一直在代码里调用ros::spinOnce()是个好习惯 * 它可以保证你指定的回调函数会被调用 */ ros::spinOnce(); /** * 调用Rate对象的sleep方法来使我们前面指定的信息发布频率10Hz生效 */ loop_rate.sleep(); ++count; } return 0; }
#include "ros/ros.h" #include "std_msgs/String.h" /** * 传给NodeHandle.subscribe()的回调函数 * 它的参数是一个share_ptr类型的只能指针,功能这里不细讲 */ void chatterCallback(const std_msgs::String::ConstPtr& msg) { ROS_INFO("I heard: [%s]", msg->data.c_str()); } int main(int argc, char **argv) { ros::init(argc, argv, "listener"); ros::NodeHandle n; /** * 参数1:话题名称 * 参数2:信息队列长度 * 参数3:回调函数,每当一个信息到来的时候,这个函数会被调用 * 返回一个ros::Subscriber类的对象,当此对象的所有引用都被销毁是,本节点将不再是该话题的订阅者 */ ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback); /** * 调用ros::spin()函数,进入一个循环 * 不断地接受信息,然后执行回调函数,知道ros::ok()返回false */ ros::spin(); return 0; }