@
特点
1、类别特征点:ground, facade, pillar, beam等
2、多度量最小二乘:
- 每个点类内的点对点(平面、线)误差度量通过线性近似联合优化以估计自我运动
- 将注册帧的静态特征点附加到本地地图中以使其保持更新。
- 对于后端,在定期存储的历史子图之间进行分层姿态图优化,以减少航位推算导致的漂移。
贡献
一种高效的点云局部配准算法MULLS-ICP,在粗略分类的几何特征点上共同实现点对点(平面、线)误差度量的线性最小二乘优化。
主要内容
1、几何特征点提取与编码

1.1 双阈值地面滤波:
预处理后的点云投影到参考平面,参考平面是水平面或上一帧的地面点拟合的平面。对于非水平激光雷达,需要知道初始方向。然后将参考平面划分为大小相等的 2D 网格。分别记录每个网格(g_i)和他3×3个相邻网格中的最小点高度,分别记为(h_{min}^{(i)})和(h_{neimin}^{(i)})。有两个阈值δh1,δh2,在网格(g_i)中的每个点(p_k)被分类为粗略确定的地面点(Grough)或非地面点(NG):
 为了细化地面点,在每个网格中采用 RANSAC 来拟合网格中的地面平面。内点保持为地面点(G),它们的法向量被定义为网格最佳拟合平面的表面法向量。
为了细化地面点,在每个网格中采用 RANSAC 来拟合网格中的地面平面。内点保持为地面点(G),它们的法向量被定义为网格最佳拟合平面的表面法向量。
1.2 基于PCA的非地面点分类
非地面点被下采样到固定数量,然后并行输入主成分分析 (PCA) 模块。逐点的 K-R 邻域 N 定义为半径为 R 的球体内最近的 K 个点。领域N的协方差矩阵C由以下方法计算:
(overline{mathbf{p}})是N的重心。特征值λ1> λ2> λ3 和对应的特征向量v,m,n 由C 的特征值分解确定,其中v,n 是N 的主向量和法向量。那么局部线性度(sigma_{1 mathrm{D}})、平面度(sigma_{2 mathrm{D}})、曲率(sigma_{c})定义为:
根据局部特征线性度(sigma_{1 mathrm{D}})、平面度(sigma_{2 mathrm{D}})、曲率(sigma_{c})的大小和v、n的方向,可以提取五类特征点,即外墙F(facade)、屋顶R(roof)、柱子P(pillar)、横梁B(beam)和顶点V(vertex)。为了细化特征点,基于(sigma_{1 mathrm{D}})、(sigma_{2 mathrm{D}})、(sigma_{c})的非最大抑制(non-maximum suppression,NMS)分别应用于线性点(P,B)、平面点(F,R)和顶点V,然后再进行各向同性的下采样。与G一起,将大致分类的特征点打包进行配准。
1.3 邻域类别上下文编码

基于提取的特征点,提出邻域类别上下文(NCC)来粗略地描述每个顶点关键点,几乎没有其他计算。. 如(3)所示,邻域内不同类别的特征点的比例、归一化的强度和地面以上的高度进行编码。NCC 后来被用作 SLAM 系统后端(III-E)中全局注册的局部特征:

2、 多度量线性最小二乘 ICP
这部分的流程总结在图3中。输入提取的多类特征点组成的源点云和目标点云,以及从源点云到目标点云的位姿变换的初始猜测(mathbf{T}_{t, s}^{ ext {guess }})。经过ICP[47]的迭代过程,输出为最终的变换估计(mathbf{T}_{t, s}),及其精度评价指标。
2.1 多类最近点关联
每次迭代,最近点对应关系由最近邻(NN)在每个特征点类别(G,F,R,P,B,V)内搜索确定,距离阈值不断减小。法向量和主向量的方向一致性检查分别进一步应用于平面点(G,F,R)和线性点(P,B)。类别、距离和方向的约束使点关联更加稳健和高效。
2.2、多度量变换估计:
假设 qi,pi为 源点云和目标点云中的对应点,源点云经过一定的旋转和平移后的残差定义为:


多种类型的残差:
- 点特征vertex,V:点到点的距离
- 面特征(G,F,R) :点到面的距离
- 线特征(P,B) : 点到线的距离
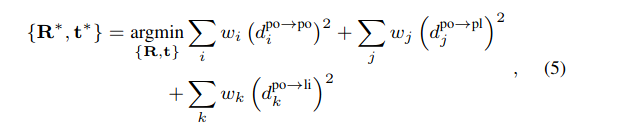
w每项对应的先验权重。在微小角度假设下,R可以近似为:

其中α、β和γ分别为roll, pitch and yaw, 在x-y'-z''欧拉角约定下。定义关于未知的参数向量为。

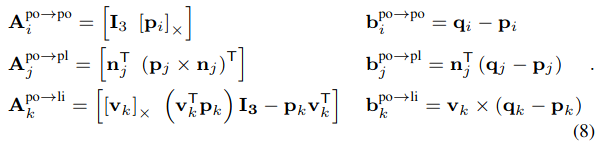
原问题,变成一个最小二乘问题Ax =b
其中:
2.3 多策略加权功能
在整个迭代过程中,提出了基于残差、平衡方向贡献和强度一致性的多策略加权函数:
首先,为了更好地处理异常值,我们提出了一个残差权重函数,该函数是从覆盖 M 估计器族的一般稳健核函数中推导出来的:
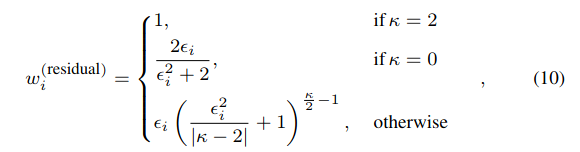
其中κ是核函数的系数,(epsilon_{i}=d_{i} / delta)是归一化残差,δ是内点噪声阈值。虽然自适应搜索最佳κ是可行的[63],但会很耗时。因此,我们在实践中固定κ= 1,从而导致伪Huber核函数。
其次,对应关系的贡献在 x、y、z 方向上并不总是平衡的。为了保证可观察性,提出了以下考虑每个类别数量的加权函数:

第三,由于强度通道为注册提供了额外的信息,所以设计了(12)来惩罚具有大强度不一致的对应关系的贡献。

2.4 多指标注册质量评价:
ICP收敛后,配准的后验标准偏差(hat sigma)和信息矩阵(I)计算为:

其中(hat sigma)和(I) 与非地面点重叠率(O_{ts})一起用于评估配准质量
3、 MULLS 前端

匀速假设得到初值-> scan 2 scan的匹配 -> scan 2 map的匹配 -> 非地面点中和周围类别不同的点当做动态点去除
4、后端

如图5(b)所示,周期性保存的子图为处理单元。子图之间的相邻边和闭环边通过经过认证的高效 TEASER [46] 全局配准构建和验证。其初始对应关系根据顶点关键点之间编码的 NCC 特征的余弦相似度确定。以 TEASER 的估计为初始猜测,map-to-map MULLS-ICP 用于通过精确的变换和信息矩阵来细化子图间边缘。那些具有较高 ˆσ 或较低 (O_{ts})阈值的边将被删除。如图6所示。 一旦添加了回环边,自由子图节点的姿态校正由子图间PGO实现。从层次上讲,子图内PGO固定每个子图的参考帧并调整其他帧的姿态。