



.







参考资料
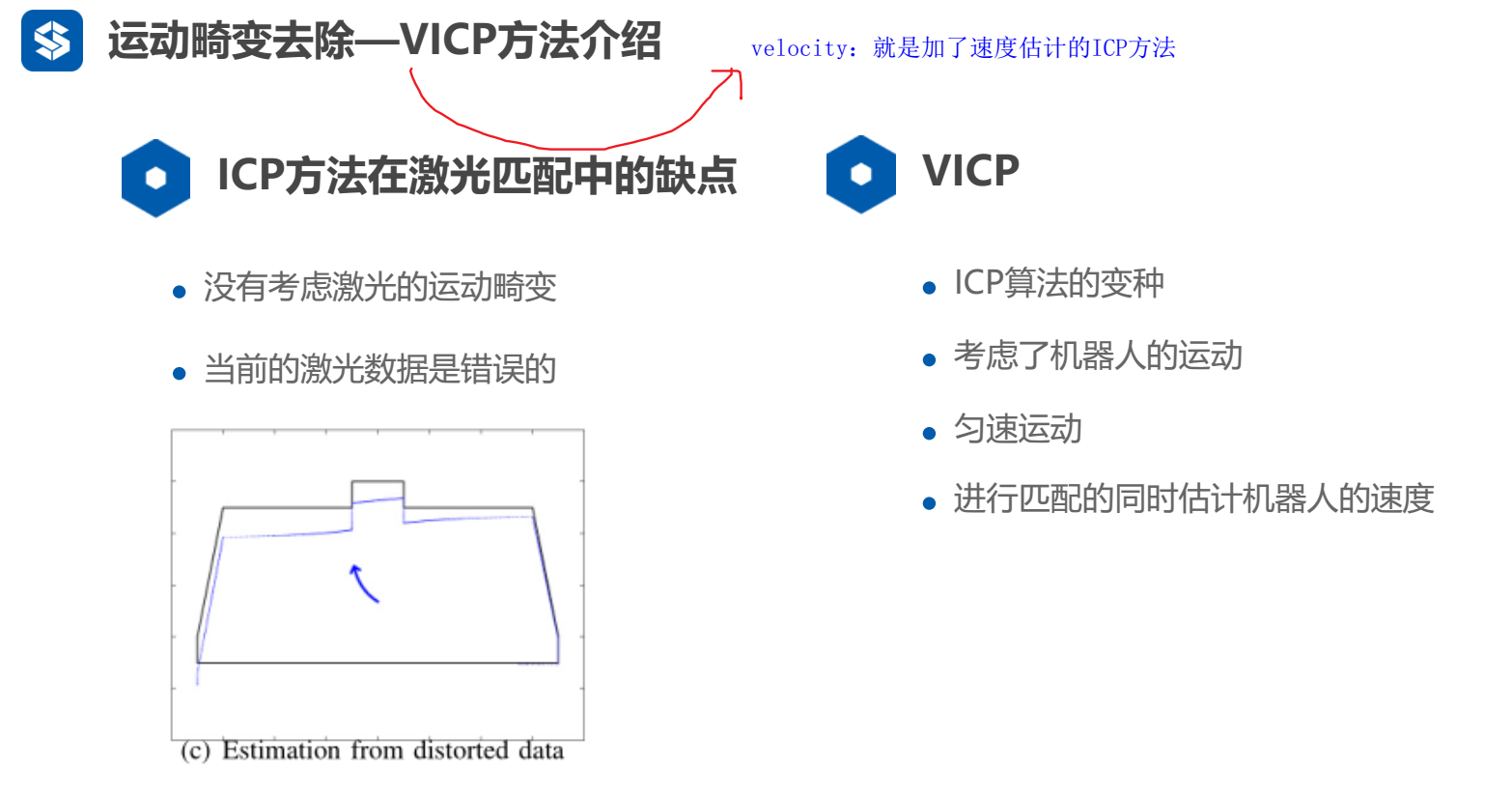
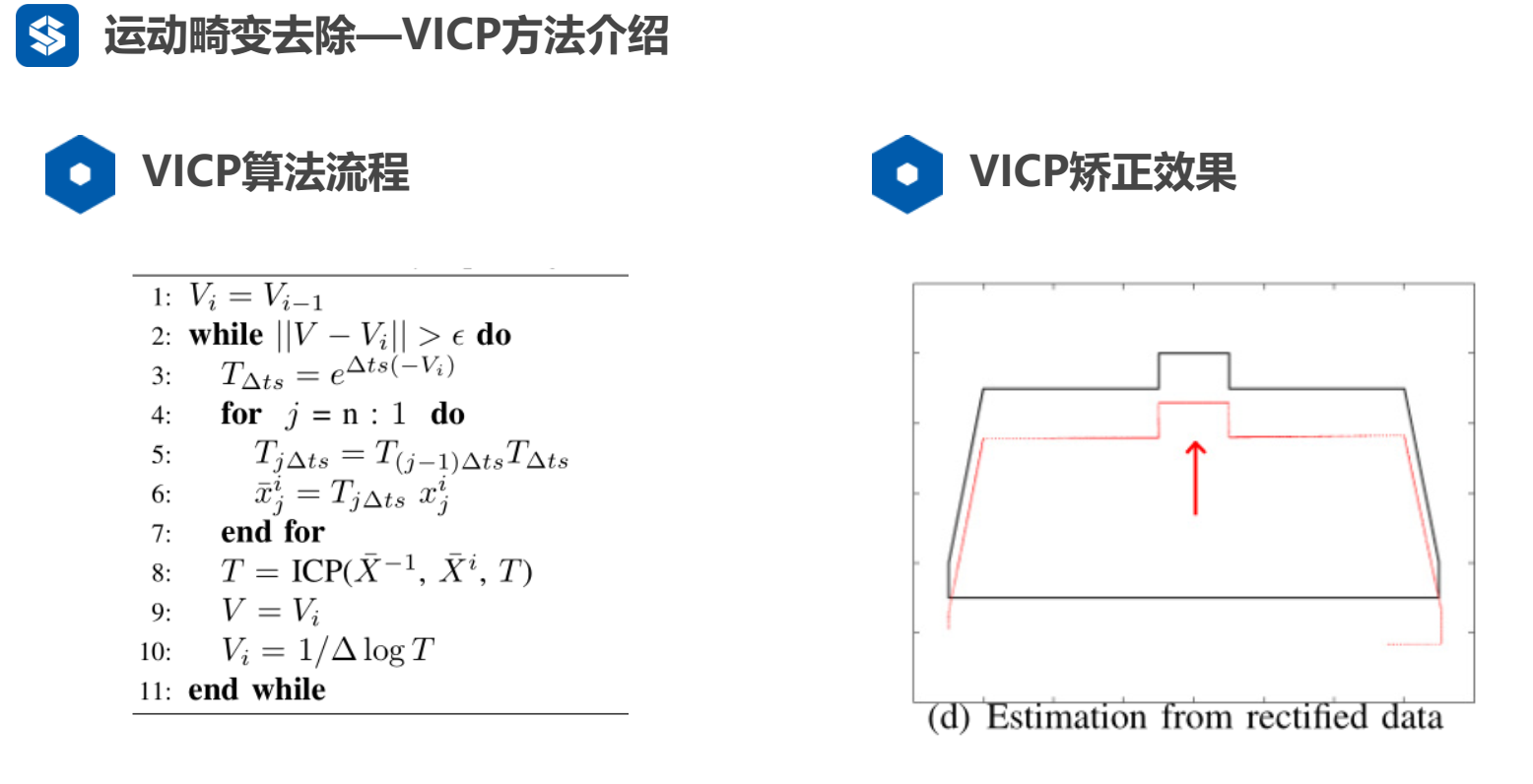
[1] VICP:Velocity updating Iterative Closest Point Algorithm.
[2] LOAM:Lidar Odometry and Mapping in real-time
.
参考资料
[1] VICP:Velocity updating Iterative Closest Point Algorithm.
[2] LOAM:Lidar Odometry and Mapping in real-time