一、pc端设置
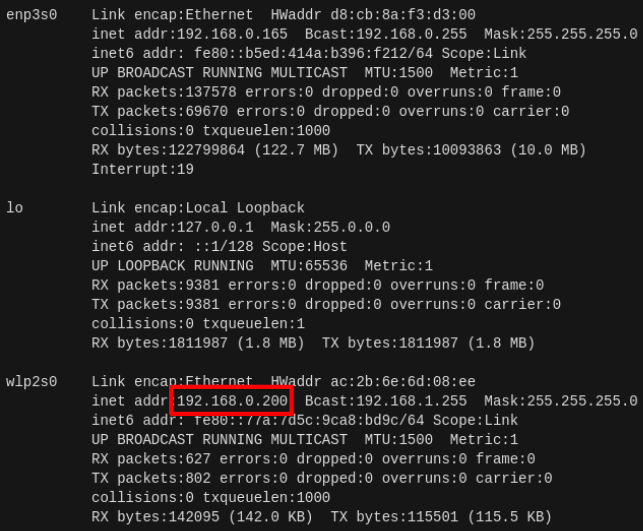
1、查看IP地址
ifconfig
如图所示,记下IP地址

2、编辑环境变量
sudo gedit ~/.bashrc
添加如下两条命令:
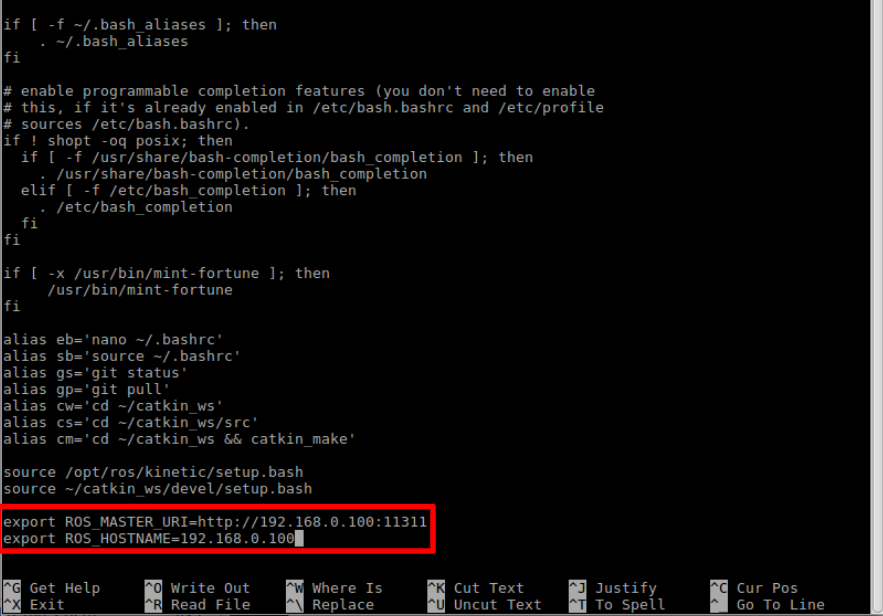
二、机器人端配置
1、查看IP地址
ifconfig
如图所示,记下IP地址
2、编辑环境变量
sudo gedit ~/.bashrc
添加如下两条命令:
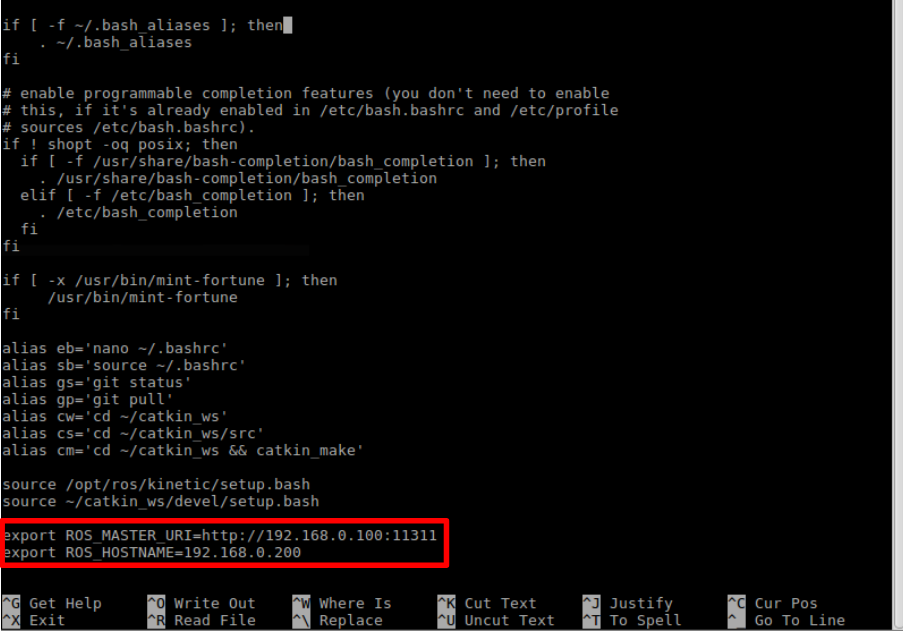
三、总结
机器人端和远程电脑端的配置是一样的,只是ROS_MASTER_URI是运行roscore的节点地址,ROS_HOSTNAME是本机地址
ROS
一、pc端设置
1、查看IP地址
ifconfig
如图所示,记下IP地址
2、编辑环境变量
sudo gedit ~/.bashrc
添加如下两条命令:
二、机器人端配置
1、查看IP地址
ifconfig
如图所示,记下IP地址
2、编辑环境变量
sudo gedit ~/.bashrc
添加如下两条命令:
三、总结
机器人端和远程电脑端的配置是一样的,只是ROS_MASTER_URI是运行roscore的节点地址,ROS_HOSTNAME是本机地址
ROS