sobel算子是一种常用的边缘检测算子,是一阶的梯度算法。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。Sobel卷积因子为:
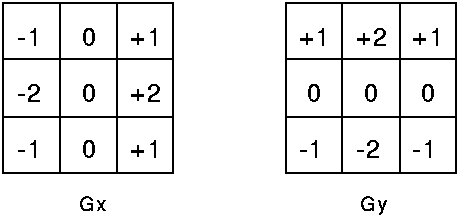
其中,Gx是横向的算子,Gy是纵向的算子。
原图像记为f,则
GX = Gx*f
GY = Gy*f
Gx =-1*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
Gy =1* f(x-1, y-1) + 2*f(x,y-1)+ 1*f(x+1,y-1)+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
其中f(a,b), 表示图像(a,b)点的灰度值
GX,GY代表利用模板对原图像卷积的结果。
对于原图像中的每一个像素,在3*3的模板中进行上述的卷积,得到GX、GY,则最后该像素的灰度值近似为:
G = |GX|+|GY|
如果G大于某一个阈值,则认定该点为一个边缘点。
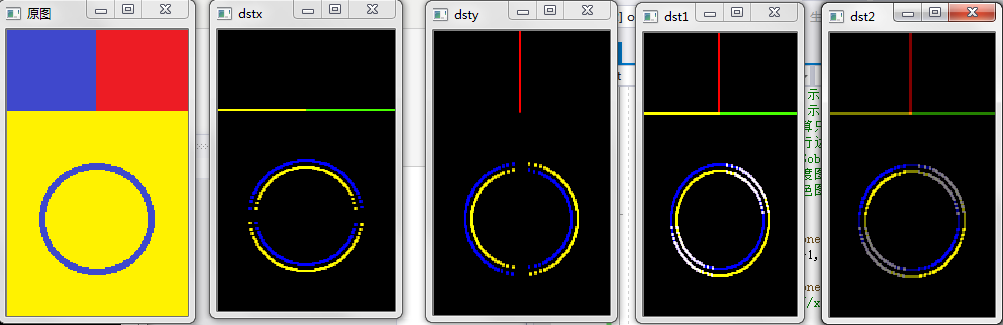
上述的处理可以同时进行两个方向的处理,当需要突出图像某一个方向的边缘信息时,也可以只进行其中一个方向的处理
其实在边缘检测中还会用到很多算子,如普利维特算子(Prewitt operate);罗伯茨交叉边缘检测(Roberts Cross operator);拉普拉斯算子等等
7.png
#include<opencv2/opencv.hpp> #include<iostream> #include <vector> int main(int argc, char** argv) { cv::Mat src = cv::imread("D:/bb/tu/7.png"); cv::Mat dstx = src.clone(); cv::Sobel(src, dstx, -1, 0, 1);//计算x方向的边缘 /* 参数1:src:输入的原图像,Mat类型 参数2:dst:输出的边缘检测结果图像,Mat型,大小与原图像相同 参数3:int ddepth:输出图像的深度,针对不同的输入图像,输出目标图像有不同的深度,具体组合如下: 若src.depth() = CV_8U, 取ddepth =-1/CV_16S/CV_32F/CV_64F 若src.depth() = CV_16U/CV_16S, 取ddepth =-1/CV_32F/CV_64F 若src.depth() = CV_32F, 取ddepth =-1/CV_32F/CV_64F 若src.depth() = CV_64F, 取ddepth = -1/CV_64F 注:ddepth =-1时,代表输出图像与输入图像相同的深度 参数4:int类型dx,x 方向上的差分阶数,1或0; 参数5:int类型dy,y 方向上的差分阶数,1或0 dx=1,dy=0,表示计算X方向的导数,检测出的是垂直方向上的边缘 dx=0,dy=1,表示计算Y方向的导数,检测出的是水平方向上的边缘 【注意:每次计算只能计算一个方向】 参数6:int ksize:为进行边缘检测时的模板大小为ksize*ksize,取值为1、3、5和7,其中默认值为3。特殊情况:ksize=1时,采用的模板为3*1或1*3 当ksize=3时,Sobel内核可能产生比较明显的误差,此时,可以使用 Scharr 函数,该函数仅作用于大小为3的内核。具有跟sobel一样的速度,但结果更精确 计算结果:如果src是灰度图,计算出的边缘值为255,非边缘值为0 如果src是彩色图,计算出的边缘值为非0值,非边缘值为0--【个人感觉彩色图比灰度图更精准】 */ cv::Mat dsty = src.clone(); cv::Sobel(src, dsty, -1, 1, 0);//计算y方向的边缘 cv::Mat dst1 = src.clone(); dst1 = dstx | dsty; //x和y方向的边缘合并 cv::Mat dst2 = src.clone(); addWeighted(dstx, 0.5, dsty, 0.5, 0, dst2);//两图合并 cv::namedWindow("原图",0); cv::imshow("原图", src); cv::imshow("dstx", dstx); cv::imshow("dsty", dsty); cv::imshow("dst1", dst1); cv::imshow("dst2", dst2); cv::waitKey(0); return 0; }