一、生物神经元与神经网络相关的部分
1.每个神经元都是一个多输入单输出的信息处理单元;
2.神经元具有空间整合和时间整合特性;
3.神经元输入分兴奋性输入和抑制性输入两种类型;
4.神经元具有阈值特性。
二、M-P神经元
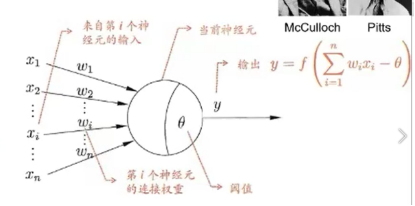

三、为什么需要激活函数
从神经元角度:
神经元继续传递信息、产生新连接的概率(超过阈值被激活,但不一定传递)
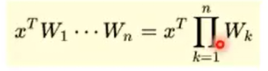
从数学的角度:
没有激活函数相当于矩阵连乘
- 多层和一层一样 2.只能拟合线性函数
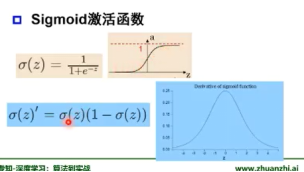
四、常见激活函数举例



五、单层感知器
- M-P神经元的权值预先设置,无法学习
- 单层感知器是首个可以学习的人工神经网络

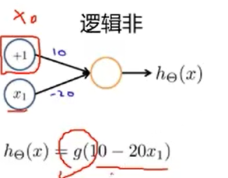
非线性激活函数

- 逻辑非的实现
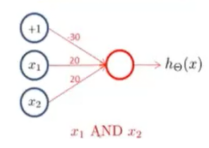
2.逻辑与

3.逻辑或

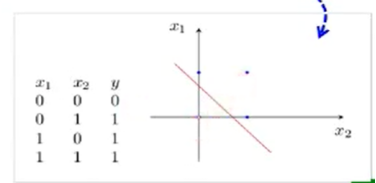
单层感知器能实现一些简单与非或问题,但是非线性问题呢?(如异或)
单层->多层感知器(可以证明单层感知器无法解决异或问题)
可以将异或问题转化为简单的逻辑电路问题,既可以通过多层感知器来解决这个问题。
Eg.用三层感知器实现同或门



六、万有逼近定理
如果一个隐层包含足够多的神经元,三层前馈神经网络(输入-隐层-输出)能以任意精度逼近任意预定的连续函数。
为什么线性分类任务组合后可以解决非线性分类任务?
可以理解为第一层感知器做的是空间的变化(运用线性代数相关知识)类似于加入变换后的支持向量机。
双隐层感知器逼近非连续函数
当隐层足够宽时,双隐层感知器(输入-隐层1-隐层2-输出)可以逼近任意非连续函数:可以解决任何复杂的分类问题。

为何神经网络的层数越多,解决问题的能力越强大?

完成输入->输出空间变换

神经网络学习如何利用矩阵的线性变换加激活函数的非线性变换,将原始输入空间投影到线性可分的空间去分类/回归。
增加节点数:增加维度,即增加线性转换能力。
增加层数:增加激活函数的次数,即增加非线性转换次数。
七、更宽or更深?
更深更好。
- 在神经元总数相当的情况下,增加网络深度可以比增加宽度带来更强的网络表示能力:产生更多的线性区域。
- 深度和宽度对函数复杂度的贡献是不同的,深度的贡献是指数增长的,而宽度的贡献是线性的。

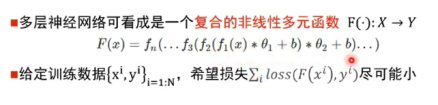
多层神经网络的问题:梯度消失?
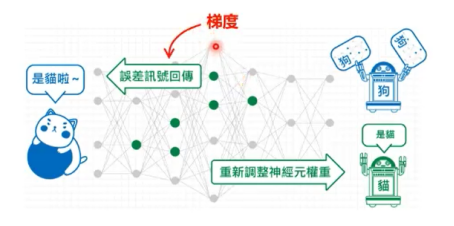
神经网络的参数学习:误差反向传播
梯度和梯度下降
- 为什么沿着这个方向可以使函数值下降:利用泰勒公式
- 对于凸函数只有一个极值点,非凸函数非常依赖初始值的选择。
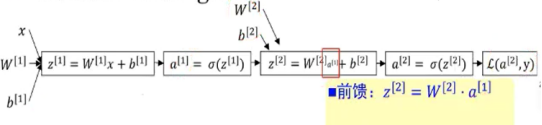
误差反向传播
符合函数的链式求导


三层前馈神经网络的BP算法
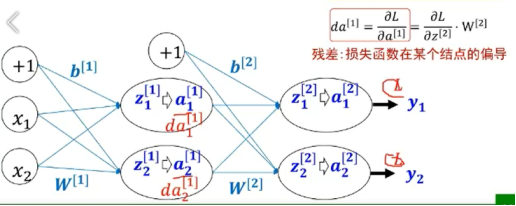

关键理解反向传播名字的来历。
深度学习开发框架(pyTorch)
多层神经网络的问题:梯度消失?
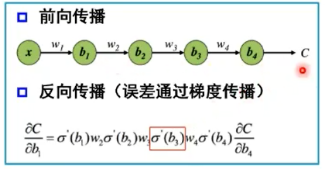
增加深度会导致梯度消失,误差无法传播;
多层网络容易陷入局部极值,难以实现。
故:三层神经网络是主流 预训练、新激活函数使深度成为可能
八、神经网络的“第二次落”
此时的缺点:
- 训练困难(梯度消失、局部极值)
- 参数多,计算力不够
- 数据不够
支持向量机优点:
- 全局最优解(凸二次规划)
- 无需调参
- 基于支持向量,小样本训练
神经网络的“第三次起”
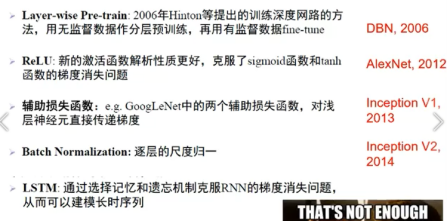
九、逐层预训练
问题一:局部极小值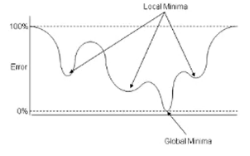
问题二:梯度消失
- 不同的初始值会收敛到不同的极值点
- 经过逐层训练后的相对不会那么发散
- 经过逐层训练它的训练会更快

两种方式实现
受限玻尔兹曼机(RBM)和自编码器
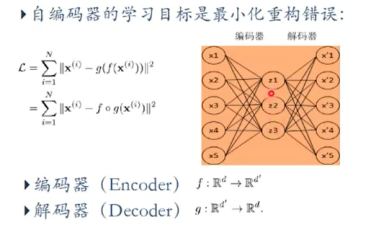
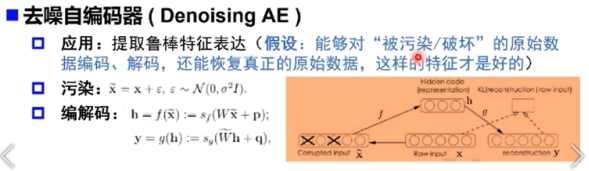
自编码器

自编码器假设输入与输出(target = input),是一种尽可能复现输入信号的神经网络。
将input输入一个encoder编码器,就会得到一个code;加一个decoder解码器,输出信息。
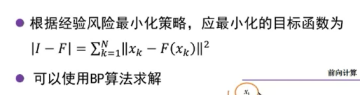
通过调整encoder和decoder的参数,是的重构误差最小
没有额外监督信息:无标签数据 误差的来源是直接重构后信号与原输入相比得到
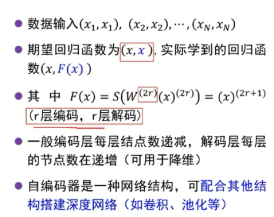
自编码器一般是一个多层神经网络(最简单:三层)
训练目标是使输出层与输入层误差最小;
中间隐层是代表输入的特征,可以最大程度上代表原输入信号。
自编码器最初被提出用来降维
堆叠自编码器
- 将多个自编码器得到的隐层串联;
- 所有层预训练完成后,进行基于监督学习的全网络微调。

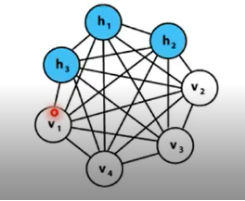
受限玻尔兹曼机(RBM)
模型结构
- RBM是两层神经网络,包含可见层v(输入层)和隐藏层h
- 不同层之间全连接,层内无连接->二分图
- 与感知器不同,RBM没有显式的重构过程:
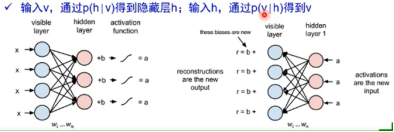
- 目的是让隐藏层得到的可见层与原来的可见层分布一致,从而使隐藏层作为可见层输入的特征。
- 两个方向权重w共享,偏置不同
- 模型参数:w, c, b
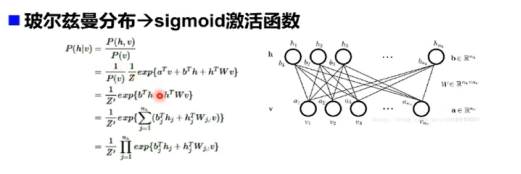
条件概率建模
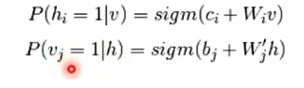

由贝叶斯公式得到条件概率。





RBM到DBN(深度信念网络)
一个DBN模型由若干个RBM堆叠而成,最后加一个监督层(BP网络)
训练过程由低到高逐层训练:
- 最底层RBM以原始输入数据训练
- 将底部RBM抽取的特征作为顶部RBM的输入继续训练
- 重复这个过程训练尽可能多的RBM层
- 基于监督信息通过全局优化算法对网络进行微调,使模型收敛
DBN和DBM的区别
- DBM没有监督层,是若干个RBM的直接堆叠
- 无向图模型,每两层间互有反馈。
一般玻尔兹曼机(BM)
可见层和隐藏内部节点之间可连接
具有很强大的无监督学习能力能够学习数据中复杂的规则
随机神经网络和递归神经网络的一种

全连接图,复杂度很高
- 难以准确计算BM所表示的分布
- 难以抽样得到服从BM所表示分布的随机样本
自编码机和受限玻尔兹曼机的区别
结构上:
自编码器编码和解码函数不同:W1,W2
RBM共享权重矩阵W,两个偏置向量
原理上:
自编码器通过非线性变换学习特征,是确定的,特征值可以为任何实数
RBM基于概率分布定义,高层表示为底层特征的条件概率,输出只有两种状态(未激活激活),用二进制0/1表示;
训练优化:
自编码器通过最损失函数L最小化重构输入数据,直接用BP优化求解
RBM基于最大似然,能量函数偏导无法直接计算,基于采样方法进行估计
生成/判别模型:
RBM对联合概率密度建模,是生成式模型;
自编码器直接对条件概率建模,是判别式模型

ReLU更好
解决梯度消失问题的方法
波尔兹曼机的理论和应用意义
BM和RBM数学上很漂亮,且有统计物理学支撑;
但受结构限制严重,生成式模型效果往往不如判别式模型;
主流的深度学习平台甚至都不支持RBM和预训练
理论:
- 模型结构:网络拓扑结构优化
- 学习算法:非线性优化过程近似
应用:
作为一种概率生成式模型应用到了协同滤波推荐、数据降维、时间序列降维问题。
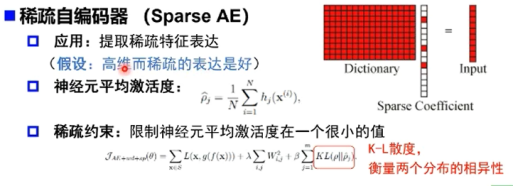
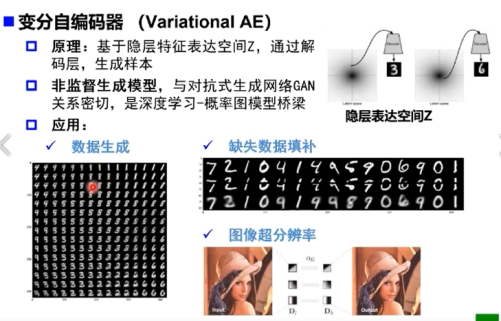
自编码器变种
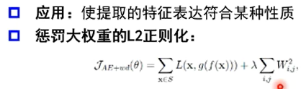
正则自编码器(Regularized AE)
两个问题
问题1:深层网络的局部极小值是非凸的激活函数导致的么?如果是,为什么不用凸激活函数?
- 深层网络的局部极小值主要是多个隐层符合导致的;
- ReLU就是凸激活函数,但多个凸激活函数的符合也不一定是凸的:比如f(x) = exp(-x)
- 在x>0时凸的,但f(f(x))就是非凸的
问题2:逐层预训练真的是为了找到更阿红的局部极小值么?
深度网络参数太多,梯度下降在非常高维空间进行,很难得到在所有维度上都是局部最小的局部最小值;
大多数情况参数落在了鞍点处:某些维度上时最低点,某些维度上是最高点->增加扰动很容易跳出鞍点。