本文参考深入浅出--梯度下降法及其实现,对后面将公式转化为矩阵的形式加了些解释,便于大家理解。
梯度下降是用来求函数最小值点的一种方法,所谓梯度在一元函数中是指某一点的斜率,在多元函数中可表示为一个向量,可由偏导求得,此向量的指向是函数值上升最快的方向。公式表示为:
[
abla J(Theta) = langle frac{overrightarrow{partial J}}{partial heta_1}, frac{overrightarrow{partial J}}{partial heta_2}, frac{overrightarrow{partial J}}{partial heta_3}
angle
]
比如
[egin{aligned}
J( heta) &= heta^2 qquad
abla J( heta) = J'( heta) = 2 heta\
J( heta) &= 2 heta_1+3 heta_2 quad
abla J( heta) = langle 2,3
angle
end{aligned}
]
由于梯度是函数值上升最快的方向,那么我们一直沿着梯度的反方向走,就能找到函数的局部最低点。
因此有梯度下降的递推公式:
[Theta^1 = Theta^0 - alpha
abla J(Theta^0)
]
其中(alpha)称为学习率,直观得讲就是每次沿着梯度反方向移动的距离,学习率过高可能会越过最低点,学习率过低又会使得学习速度偏慢。
为了更好的理解上面的公式
我们举例:
[quad J( heta) = heta^2 Longrightarrow
abla J( heta) = J'( heta) = 2 heta
]
则梯度下降的迭代过程有:
[egin{aligned}
heta^0 &= 1 \
heta^1 &= heta^0 - alpha imes J'( heta^0) \
&= 1-0.1 imes 2 \
&= 0.2 \
heta^2 &= heta^1 - alpha imes J'( heta^1)\
&= 0.04\
heta^3 &= 0.008\
heta^4 &= 0.0016\
end{aligned}
]
我们知道$J( heta) = heta^2 (的极小值点在)(0,0)(处,而迭代四次后的结果)(0.0016,0.00000256)$已相当接近。
再举一个二元函数的例子:
[J(Theta) = heta_1^2 + heta_2^2 Longrightarrow
abla J(Theta) = langle 2 heta_1 + 2 heta_2
angle
]
令(alpha = 0.1), 以初始点((1,3))用梯度下降法求函数最低点
[egin{aligned}
Theta^0 &= (1,3) \
Theta^1 &= Theta^0 - alpha
abla J(Theta^0)\
&= (1,3) - 0.1(2,6)\
&= (0.8,2.4)\
Theta^2 &= (0.8,2.4) - 0.1(1.6,4.8)\
&= (0.64,1.92) \
Theta^3 &= (0.512,1.536) \
end{aligned}
]
值得注意的是,迭代的效率除了和步长(学习率)(alpha)有关外,还与初始值的选取有关。
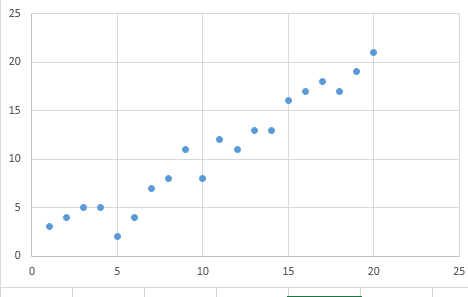
梯度下降做散点拟合
[egin{aligned}
&
abla J(Theta) = langle frac{delta J}{delta heta_0}, frac{delta J}{delta heta_1}
angle \
&frac{delta J}{delta heta_0} = frac{1}{m} sum_{i=1}^m leftlbrace h_Theta(x_i) - y_i
ight
brace\
&frac{delta J}{delta heta_1} = frac{1}{m} sum_{i=1}^m leftlbrace h_Theta(x_i) - y_i
ight
brace x_i\
end{aligned}
]
为了便于利用python的矩阵运算,我们可以将公式稍微变形
[egin{aligned}
h_Theta(x_i) &= heta_0 imes 1 + heta_1 imes x_i \
&=
egin{bmatrix}
1 & x_0\
1 & x_1\
vdots & vdots\
1 & x_{19}\
end{bmatrix}
imes
egin{bmatrix}
heta_0\
heta_1
end{bmatrix}
end{aligned}
]
(i)的范围是([1,20]),因此最后得到
[h_Theta(x_i)=
egin{bmatrix}
h_0\
h_1\
vdots\
h_{19}
end{bmatrix}
]
[误差diff =
egin{bmatrix}
h_0\
h_1\
vdots\
h_{19}
end{bmatrix}-
egin{bmatrix}
y_0\
y_1\
vdots\
y_{19}
end{bmatrix}
]
[方差和
sum_{i=1}^m leftlbrace h_Theta(x_i) - y_i
ight
brace ^2=diff^T imes diff
]
将公式变为矩阵向量相乘的形式后你应当更容易理解下面的python代码
import numpy as np
# Size of the points dataset.
m = 20
# Points x-coordinate and dummy value (x0, x1).
X0 = np.ones((m, 1))
X1 = np.arange(1, m+1).reshape(m, 1)
X = np.hstack((X0, X1))
# Points y-coordinate
y = np.array([
3, 4, 5, 5, 2, 4, 7, 8, 11, 8, 12,
11, 13, 13, 16, 17, 18, 17, 19, 21
]).reshape(m, 1)
# The Learning Rate alpha.
alpha = 0.01
def error_function(theta, X, y):
'''Error function J definition.'''
diff = np.dot(X, theta) - y
return (1./(2*m)) * np.dot(np.transpose(diff), diff)
def gradient_function(theta, X, y):
'''Gradient of the function J definition.'''
diff = np.dot(X, theta) - y
return (1./m) * np.dot(np.transpose(X), diff)
def gradient_descent(X, y, alpha):
'''Perform gradient descent.'''
theta = np.array([1, 1]).reshape(2, 1)
gradient = gradient_function(theta, X, y)
while not np.all(np.absolute(gradient) <= 1e-5):
theta = theta - alpha * gradient
gradient = gradient_function(theta, X, y)
return theta
optimal = gradient_descent(X, y, alpha)
print('optimal:', optimal)
print('error function:', error_function(optimal, X, y)[0,0])