SPI
一、SPI简介
SPI(Serial Peripheral Interface )是串行外围接口设备,是一种高速的,全双工,同步的通信总线,并且在芯片上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是处于这种简单易用的特性,现在越来越多的芯片集成了这种协议。
SPI 是一个环形总线结构,由 ss(cs)、 sck、 sdi、 sdo 构成,其时序其实很简单,主要是在 sck 的控制下,两个双向移位寄存器进行数据交换。
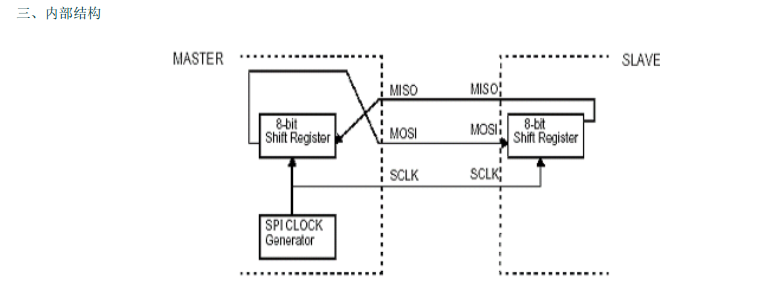
因为是全双工同步通信,所以在传输数据时,左边主机的数据从移位寄存器进入MOSI线上进入右边的从机,并存入最低位,同时从机的最高位通过MISO传输到主机的最低位,当第二位数据进行发送时,最低位的数据会向左移一位并将新数据存入最低位。
二、通信协议
1、物理层
motorola公司 首先提出的全双工三线同步串行外围接口,采用主从模式( Master Slave)架构;支持多 slave 模式应用,一般仅支持单Master(单主机模式)。
管脚
三线SPI:SCLK(时钟线),MISO(主机接收从机发送),MOSI(主机发送从机接收)
四线SPI:CS(片选线),SCLK,MISO,MOSI
片选:被选,确定该设备处于何种工作模式
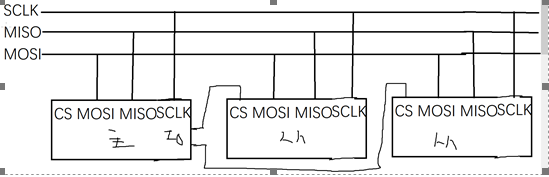
连接方式
2、数据链路层
SPI采用位协议,------高位在前,低位在后
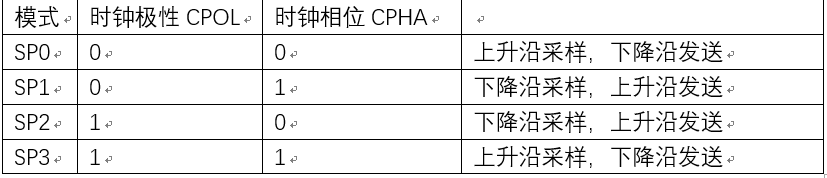
SPI有四种工作模式,SPI0 SPI1 SPI2 SPI3
SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协
议没有重大的影响。如果 CPOL=0,串行同步时钟的空闲状态为低电平;如果 CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位(CPHA)
能够配置用于选择两种不同的传输协议之一进行数据传输。如果 CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如
果 CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。 SPI 主模块和与之通信的外设音时钟相位和极性应该一致。
SPI 时序图详解---SPI 接口在模式 0 下输出第一位数据的时刻
三、STM32中SPI控制器
数量:2个 SPI1 SPI2
特性:全双工同步通信
8/16是传输帧选择
主从结构
8个主模式波特率预分频系数
主模式和从模式下均可以由软件或硬件进行NSS管理
可编程的时钟极性和相位
可编程的数据顺序, MSB在前或LSB在前
四、配置工作模式
1、NSS管理
SPI可以工作为主机模式和从机模式,可以通过软件模式和硬件模式进行管理。
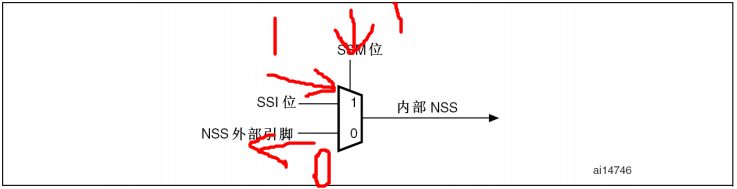
SPI的NSS引脚分为内部引脚和外部引脚,当内部引脚检测到高电平的时候,设备会工作在主机模式,检测到低电平,工作在从机模式。
先说软件模式,软件模式可以通过SPI_CR1寄存器的SSM为进行设置,当SSM位为1时,SPI的模式管理为软件管理模式,且当SSI位为1时(SSI位仅在SSM位为1时有效),内部的NSS会被驱动为高电平,该设备就设置为主机模式且外部NSS引脚会输出一个低电平信号,当其他的设备检测到低电平信号时,会自动进入从机模式。

![]()
硬件模式:
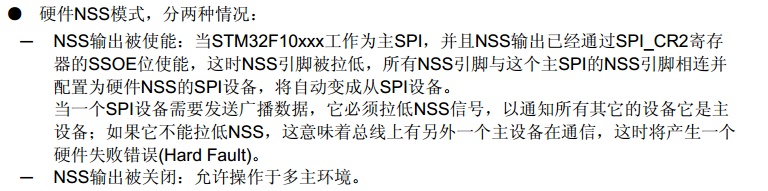
NSS输出使能通过CR2的SSOE位进行控制,一旦该位被使能,NSS引脚作为一个输出引脚,若SPI工作为主机模式,NSS会输出一个低电平,当其他设备的NSS引脚接到主设备的引脚,会检测到一个低电平,并会自动进入从设备状态。当配置为主模式,NSS配置为输入引脚,(MSTR=1,SSOE=0)时,如果NSS被拉低,则配置为主模式水白,会自动进入从工作模式。
若向通过硬件管理工作模式,只需将需要配置为主模式的NSS引脚接高电平,从模式的NSS接低电平即可。
更详细的NSS工作模式介绍见:https://blog.csdn.net/andylauren/article/details/52259703
五、SPI配置过程
1、查看原理图确定引脚,以及各个引脚的工作模式

这里spi的四个引脚分别对应pa4,pa5,pa6,pa7,SPI作为主机,MOSI,cs,clk应给配置为输出模式,miso配置为输入。
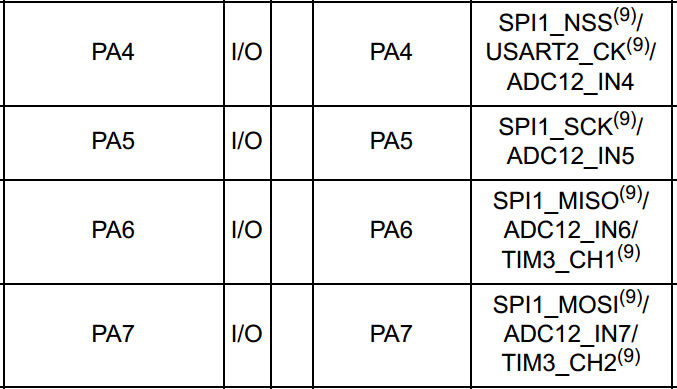
所以为了将SPI的功能复用到IO扣上,pa5,pa7要用作复用推挽输出。(pa4为什么配置为通用推挽输出现在我还没弄明白,等明白了再改回来)
2、确定spi的时钟相位以及时钟极性等工作模式
因为时钟相位和时钟极性可以配置出4种spi的模式,而spi的工作模式与数据的采集以及输出有关,所以我们这里要根据外设来确当spi的工作模式。

#include "spi.h"
void SPI_Config(void)
{
/*
pa4 sf cs 通用推挽输出
pa5 sc clk 复用推挽输出
pa6 miso 浮空输入
pa7 mosi 复用推挽输出
*/
//GPIO
GPIO_InitTypeDef GPIOInitStruct;
//SPI
SPI_InitTypeDef SPIInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_SPI1,ENABLE);
//pa4 通用推挽输出
GPIOInitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIOInitStruct.GPIO_Pin = GPIO_Pin_4;
GPIOInitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIOInitStruct);
//pa5 pa7 复用推挽输出
GPIOInitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIOInitStruct.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7;
GPIO_Init(GPIOA,&GPIOInitStruct);
//pa6 浮空输入
GPIOInitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIOInitStruct.GPIO_Pin = GPIO_Pin_6;
GPIO_Init(GPIOA,&GPIOInitStruct);
//SPI
SPIInitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2; //分频
SPIInitStruct.SPI_CPHA = SPI_CPHA_1Edge; //时钟相位
SPIInitStruct.SPI_CPOL = SPI_CPOL_Low; //时钟极性
SPIInitStruct.SPI_DataSize = SPI_DataSize_8b; //数据宽度
SPIInitStruct.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //全双工
SPIInitStruct.SPI_FirstBit = SPI_FirstBit_MSB; //高位在前
SPIInitStruct.SPI_Mode = SPI_Mode_Master; //主机
SPIInitStruct.SPI_NSS = SPI_NSS_Soft; //软件模式
SPI_Init(SPI1,&SPIInitStruct);
//使能SPI
SPI_Cmd(SPI1,ENABLE);
}