深度图(维基百科)
n 3D computer graphics a depth map is an image or image channel that contains information relating to the distance of the surfaces of scene objects from a viewpoint. The term is related to and may be analogous to depth buffer, Z-buffer, Z-buffering and Z-depth.[1] The "Z" in these latter terms relates to a convention that the central axis of view of a camera is in the direction of the camera's Z axis, and not to the absolute Z axis of a scene.
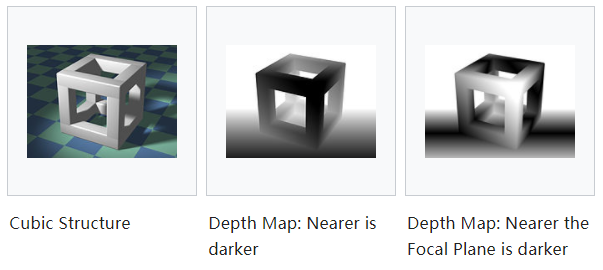
Depth map 深度图是一张2D图片,每个像素都记录了从视点(viewpoint)到遮挡物表面(遮挡物就是阴影生成物体)的距离,这些像素对应的顶点对于观察者而言是“可见的”。
Depth map中像素点记录的深度值为lenth1;然后从视点出现,计算物体顶点v到视点的距离,记为lenth2;比较二者大小,来确定“v”是否被遮挡。该术语的同义词有depth buffer, Z-buffer, Z-buffering 和 Z-depth。这里的"Z"是相对于相机(即视点)视图中心轴线而言的,也就是相机的z轴线,而不是场景的绝对坐标中的z轴线。
用途
-
模拟在一个场景中的密度均匀的半透明介质效果-如雾,烟或大量的水;
-
模拟场景表面的深度域(depth of field (DOF));
-
可用于高效的变形体碰撞检测。
体素(维基百科)
体素或立体像素(voxel),是体积像素(volume pixel)的简称。概念上类似二维空间的最小单位——像素,像素用在二维电脑图像的视频数据上。体积像素一如其名,是数字数据于三维空间分区上的最小单位,应用于三维成像、科学数据与医学视频等领域。有些真正的三维显示器运用体素来描述它们的分辨率,举例来说:可以显示512×512×512体素的显示器。
如同像素,体素本身并不含有空间中位置的数据(即它们的座标),然而却可以从它们相对于其他体素的位置来推敲,意即它们在构成单一张体积视频的数据结构中的位置。
网格(维基百科)
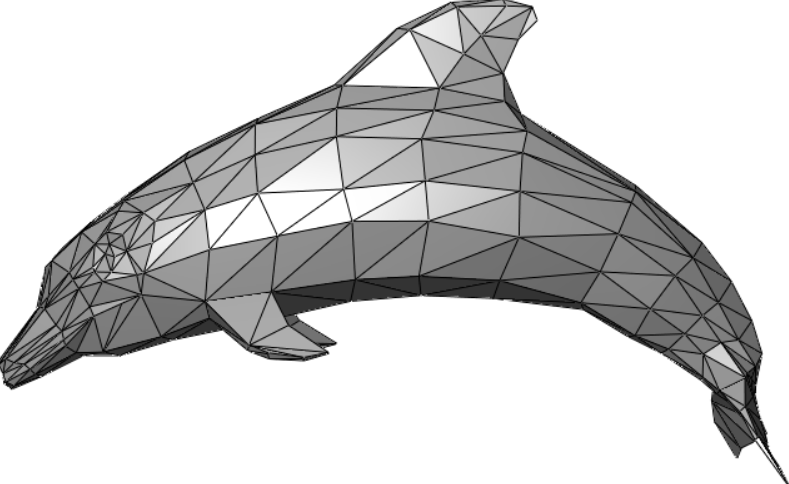
多边形网格(Polygon mesh)是三维计算机图形学中表示多面体形状的顶点与多边形的集合,它也叫作非结构网格。
这些网格通常由三角形、四边形或者其它的简单凸多边形组成,这样可以简化渲染过程。但是,网格也可以包括带有空洞的普通多边形组成的物体。
非结构网格内部表示的例子有:
- 一组顶点的简单列表,它们带有表示那些顶点组成多边形的信息列表;另外可能带有表示空洞的附加信息。
- 顶点列表 + 边界列表(一对索引信息)+ 连接边界的多边形列表
- 翼边数据结构
根据应用程序的不同所选择的数据结构也有所不同:三角形的处理要比普通多边形的处理更加简单,尤其是在计算几何中更是这样。对于优化的算法,可能需要快速访问边线或者相邻表面这样的拓扑信息,这样就需要如翼边表示这样更加复杂的结构。
点云(维基百科)
点云(point cloud)是指透过3D扫描器所取得之资料型式。
扫描资料以点的型式记录,每一个点包含有三维座标,有些可能含有色彩资讯(R,G,B)或物体反射面强度。[1]
点云数据除了具有几何位置以外,还有强度(Intensity)信息,强度信息的获取是激光扫描仪接受装置采集到的回波强度,此强度信息与目标的表面材质、粗糙度、入射角方向,以及仪器的发射能量,激光波长有关。点云也是逆向工程中通过仪器测量外表的点数据集合。
点云应用深度学习面临的挑战:
非结构化数据, 不变性排列, 点云数据量上的变化(不同传感器上点云的数量变化很大)
点云数据方面的挑战:
- 缺少数据: 扫描的模型通常被遮挡,部分数据丢失
- 噪音: 所有传感器都是嘈杂的。有几种类型的噪声,包括点云扰动和异常值。这意味着一个点有一定的概率位于它被采样的地方(扰动)附近的某一半径范围内,或者它可能出现在空间的任意位置(异常值)
- 旋转: 一辆车向左转,同一辆车向右转,会有不同的点云代表同一辆车
在点云上直接用深度学习的方法是将数据转换成体积表示,比如体素网格,然后就可以用3D滤波器来训练CNN,但是体积数据会变得非常大,3D CNN处理会非常慢,所以需要妥协到较低的分辨率,就会带来量化误差的代价
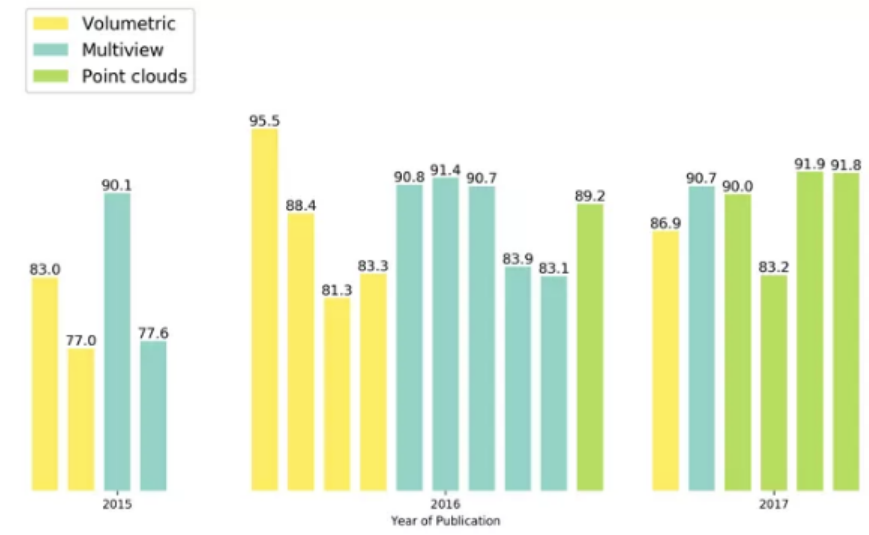
以下为主要的三种方法的论文发表数量统计:
针对无序点云数据的深度学习方法研究进展缓慢,主要有三个方面:
- 点云具有无序性
- 点云具有稀疏性
- 在KITTI数据集中,如果把原始的激光雷达点云投影到对应的彩色图像上,大概只有3%的像素才有对应的雷达点。这种极强的稀疏性让基于点云的高层语义感知变得尤其困难。
- 点云信息量有限
- 点云的数据结构就是一些三维空间的点坐标构成的点集,本质是对三维世界几何形状的低分辨率重采样,因此只能提供片面的几何信息。
举例说明
iphoneX 3D结构光双摄
用的是PrimeSense的结构光深度重建方案(Depth),和普通的彩色RGB不同,深度摄像头输出的时RGBD图像,多了一个深度通道,深度图像看起来是这样的:
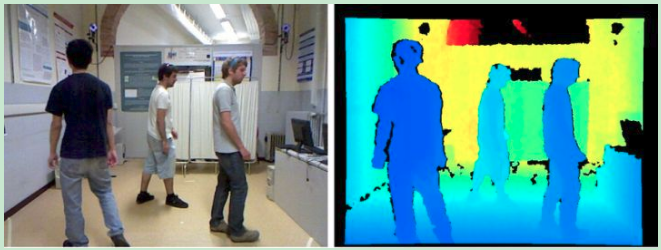
由深度图可以得到点云,进而得到网格(mesh)
效果如下:
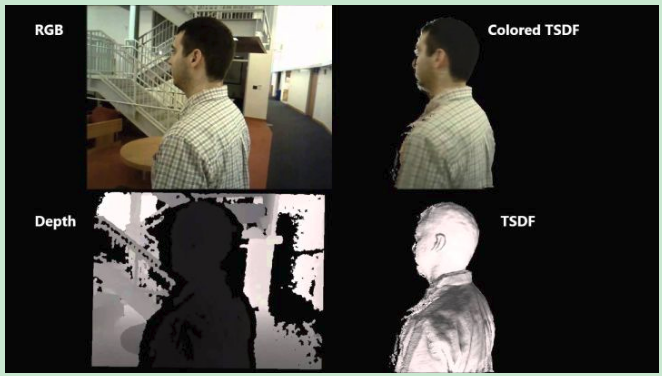
- 3D 重建后的人脸,比 2D人脸多了很多信息,识别显然会更准确。
- 由于结构光的特性,每一帧数据都能重建出完整的 3D 模型,速度也非常快,才能适应像手机解锁这样的应用。
- 结构光方案因为自带光源,所以天黑的时候也能用。