大疆 210云台控制 https://developer.dji.com/onboard-sdk/documentation/sample-doc/advanced-sensing-target-tracking.html


0 开启图像端
0.1 图像跟踪 http://www.cnblogs.com/kekeoutlook/p/8353357.html
图像鼠标选取目标,之后不断保存目标信息,存入共享内存
- 中心(x,y)和长宽
- 发送标志位1判断是否
工程
0.2 共享内存获取和存数据
http://www.cnblogs.com/kekeoutlook/p/8330336.html
1原有速度和角度控制模式


最终执行了 函数
函数
修改控制云台发送速率 为20HZ
cameraSend = new QTimer(); cameraSend->setInterval(50); // 20Hz connect(cameraSend, SIGNAL(timeout()), this, SLOT(on_tmr_Camera_autosend()));
修改共享内存读取速度
connect(timerBroadcast, SIGNAL(timeout()), this, SLOT(on_tmr_Broadcast())); timerBroadcast->start(50);// 共享内存接收数据的频率 原有300 改为 50 -20HZ
2像素差值控制速度调整云台

10个像素 - 1角度
2.1云台初始化
void DJIonboardSDK::on_tmr_Broadcast()
{
//! @note this function cost too much time to run.
//! it is better run outside the broadcastCallback.
/*读取共享内存数据*/
memcpy(&recBOX, recBOX_DATA, sizeof(TrackBox));
qDebug("flag= %d ", recBOX.flag);
qDebug("old_flag= %d ", old_flag);
if (old_flag == 0 && recBOX.flag == 1)
{
firstflag = 1;
}
else
{
firstflag = 0;
}
//qDebug("firtflag= %d ", firstflag);
//qDebug(" %f ", cam->getYaw());
old_flag = recBOX.flag;
if (recBOX.flag != 0)
{
//qDebug(" %d ", recBOX.flag);
itarget_x = recBOX.x;// 中心
//qDebug("target_x:%d ", recBOX.x);
itarget_y = recBOX.y;
//qDebug("target_x:%d target_y:%d", recBOX.x, recBOX.y);
itarget_h = recBOX.height;
itarget_w = recBOX.width;
// img_w,
// img_h;
// waitKey(1);
}
else {
itarget_x = 1920 / 2;// 中心
//qDebug("Test:%d", recBOX.x);
itarget_y = 1080 / 2;
//qDebug("Test:%d", recBOX.y);
qDebug("target_x:%d target_y:%d", itarget_x, itarget_y);
}
2.2云台速度限制
void DJIonboardSDK::on_btr_camera_speed_clicked()
{
ui->hs_camera_yaw->setMinimum(-1800);
ui->hs_camera_yaw->setMaximum(1800);
ui->hs_camera_roll->setMinimum(-1800);
ui->hs_camera_roll->setMaximum(1800);
ui->hs_camera_pitch->setMinimum(-1800);
ui->hs_camera_pitch->setMaximum(1800);
resetCameraAngle();
ui->gb_cameraFlag->setEnabled(false);
}
2.3速度云台控制 10个像素转化每秒一度
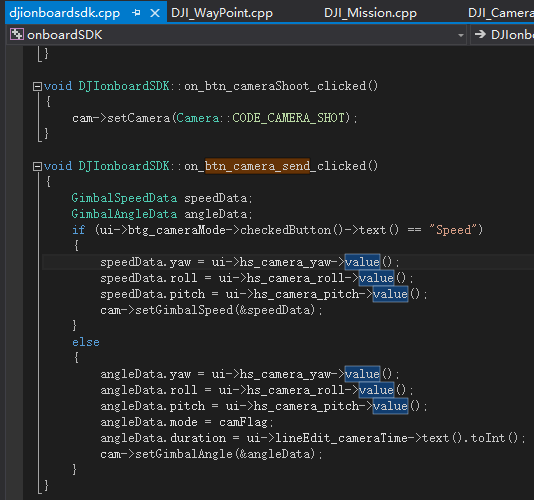
void DJIonboardSDK::on_btn_camera_send_clicked()
{
GimbalSpeedData speedData;
GimbalAngleData angleData;
if (ui->btg_cameraMode->checkedButton()->text() == "Speed")
{
//int itarget_x, itarget_y, itarget_h, itarget_w;
//int img_w, img_h;
int dx = 0;
int dy = 0;
int yawRate = 0;
int pitchRate = 0;
//dx = (int)(itarget_x + itarget_w / 2 - img_w / 2);
//dy = (int)(itarget_y + itarget_h / 2 - img_h / 2);
dx = (int)(itarget_x - 1920 / 2);
dy = (int)(itarget_y - 1080 / 2);
yawRate = dx;
pitchRate = -dy;
if (itarget_w / 2 < 30) { itarget_w = 60; };
if (itarget_h / 2 < 30){ itarget_h = 60; };
if (abs(dx) < itarget_w/2)
{
yawRate = 0;
}
if (abs(dy) < itarget_h/2)
{
pitchRate = 0;
}
speedData.yaw = yawRate;
speedData.roll = 0;
speedData.pitch = pitchRate;
cam->setGimbalSpeed(&speedData);
}
else
{
angleData.yaw = ui->hs_camera_yaw->value();// 每次+5 --0.5
angleData.roll = ui->hs_camera_roll->value();
angleData.pitch = ui->hs_camera_pitch->value();
angleData.mode = camFlag;
angleData.duration = ui->lineEdit_cameraTime->text().toInt();
cam->setGimbalAngle(&angleData);
}
}
2.4 加入PID调参的速度控制策略
PID初始化
DJIonboardSDK::DJIonboardSDK(QWidget *parent) : QMainWindow(parent), ui(new Ui::DJIonboardSDK)
{
ui->setupUi(this);
ui->btn_flightCheckStatus->setVisible(false);
ui->btn_waypointDownload->setVisible(false);
ui->btn_waypoint_reset->setVisible(false);
ui->tabWidget->removeTab(3);
PID_X.reset();
PID_Y.reset();
PID_X.setParam(0.44, 0.06, 0.007, 0);
PID_Y.setParam(0.6, 0.05, 0.02, 0);
//不过冲,但速度慢
//PID_X.setParam(0.4, 0.04, 0.03, 0);
//PID_Y.setParam(0.5, 0.05, 0.02, 0);
initSDK();
initDisplay();
initFlight();
initCamera();
initFollow();
initWayPoint();
initVirtualRC();
initShareMemory();
取数据
connect(timerBroadcast, SIGNAL(timeout()), this, SLOT(on_tmr_Broadcast())); timerBroadcast->start(20);// 共享内存接收数据的频率 原有300 改为 50HZ
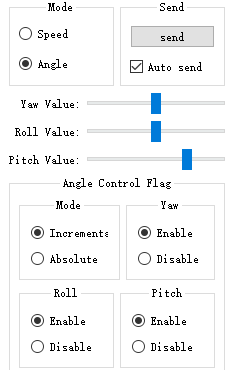
3 像素控制 像素差转化为角度增量
X3相机
视场角度 W 73.9度 H 53度
图像分辨率 1920 * 1080
- 问题 int/float 型 引发 0的问题

选择Increments 会在原来的基础之上angleData.yaw, angleData.roll,angleData.pitch 增加差量大小
- angleData.yaw = yawRate * 793 / 1920;// 横向 像素差---角度
angleData.roll = 0;
angleData.pitch = pitchRate * 500 / 1080 ; // 纵向 像素差---角度
选择Absolute 会绝对控制 直接将angleData.yaw, angleData.roll,angleData.pitch设置成差量大小
3.1 设置角度范围
void DJIonboardSDK::on_btr_camera_angle_clicked()
{
ui->hs_camera_yaw->setMinimum(-3200);
ui->hs_camera_yaw->setMaximum(3200);
ui->hs_camera_roll->setMinimum(-350);
ui->hs_camera_roll->setMaximum(350);
ui->hs_camera_pitch->setMinimum(-900);
ui->hs_camera_pitch->setMaximum(300);
ui->gb_cameraFlag->setEnabled(true);
resetCameraAngle();
}
3.2 控制策略
void DJIonboardSDK::on_btn_camera_send_clicked()
{
GimbalSpeedData speedData;
GimbalAngleData angleData;
if (ui->btg_cameraMode->checkedButton()->text() == "Speed")
{
//int itarget_x, itarget_y, itarget_h, itarget_w;
//int img_w, img_h;
}
else
{
int yawRate = 0;
int pitchRate = 0;
// 坐标为左上角坐标
//dx = (int)(itarget_x + itarget_w / 2 - img_w / 2);
//dy = (int)(itarget_y + itarget_h / 2 - img_h / 2);
//qDebug("x= %d ,y=%d", itarget_x, itarget_y);
//坐标为中心坐标
dx = (int)(itarget_x - 1920 / 2);
dy = (int)(itarget_y - 1080 / 2);
yawRate = dx;
pitchRate = -dy;
angleData.yaw = yawRate * 793 / 1920;// 横向 像素差---角度
angleData.roll = 0;
angleData.pitch = pitchRate * 500 / 1080 ; // 纵向 像素差---角度
angleData.mode = camFlag;
angleData.duration = ui->lineEdit_cameraTime->text().toInt();
cam->setGimbalAngle(&angleData);
}
}