官方文档 http://esp8266.github.io/Arduino/versions/2.1.0/doc/libraries.html
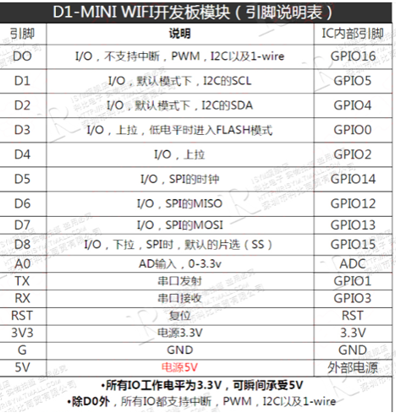
引脚口说明 http://yfrobot.com/thread-11798-1-1.html
数字I/O口 Digital IO
Arduino 引脚号直接对应ESP8266 GPIO 引脚。pinMode,digitalRead,和 digitalWrite 函数照常使用,所以读取GPIO2引脚,这样写:digitalRead(2) 。
数字引脚 0~15可以设置为 INPUT,OUTPUT 或者 INPUT_PULLUP 模式。引脚 16可以设置为INPUT,OUTPUT 或者 INPUT_PULLDOWN_16 模式。在启动时,引脚被配置为INPUT。
引脚同样可以提供其他功能,像串行,I2C,SPI。这些函数通常需要使用相应的库。下图为ESP-12模块的引脚图:
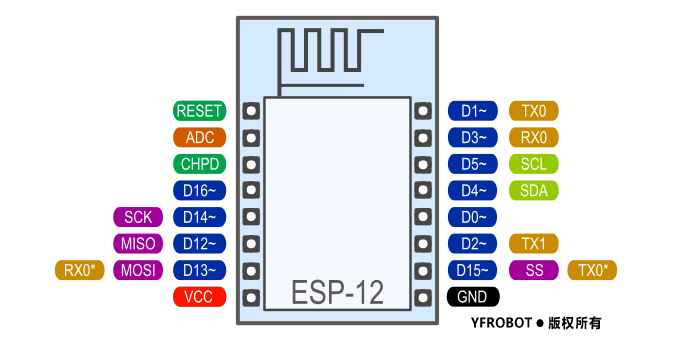
注意:有些电路板和模块(ESP-12ED NodeMCU 1.0)也释放了引脚9和11,如果Flash芯片工作在DIO模式下(默认QIO模式),它们可以被当做IO口使用。
引脚中断可以使用 attachInterrupt,detachInterrupt函数。除了GPIO16引脚,其他引脚都可以使用中断功能。标准的Arduino 中断类型都是支持的:CHANGE,RISING,FALLING。
模拟输入 Analog input
ESP8266只有一个ADC通道提供给用户。它可以使用于读取ADC引脚电压,也可使用于读取模块电源电压(VCC)。
读取ADC引脚值电压,使用analogRead(A0)。输入电压范围:0~1.0V。
读取模块电源电压,使用ESP.getVcc() 且ADC引脚不能连接。另外,下面的代码必须添加至程序中:
ADC_MODE(ADC_VCC);
这条代码不能包含在任何函数中,放在程序中 #include 之后即可。
模拟输出 Analog output
analogWrite(pin, value) 在已有的引脚上使能软件PWM功能。PWM可以用在引脚0~16。调用analogWrite(pin, 0) 可以关闭引脚PWM。取值范围:0~ PWMRANGE,默认为1023。 PWM 范围可以使用analogWriteRange(new_range)语句来更改。
PWM 默认频率:1KHz。使用analogWriteFreq(new_frequency) 可以更改频率。
时间与延时 Timing and delays
millis() 和 micros() 分别返回单位为毫秒和微秒的值,复位后值重置。
delay(ms) 暂时程序给定毫秒时间并允许WiFi和TCP/IP任务的运行。delayMicroseconds(us) 暂时程序给定微秒时间。
记住wifi连接后除了素描程序外还有许多代码需要再芯片上运行。每次loop()函数完成时或当delay被调用时,Wifi和TCP/IP库都有机会处理任何等待事件。如果你程序中某处有循环,消耗事件大于50ms且没有调用delay,你可以考虑添加一个调用延时函数以保持Wifi堆栈的平稳运行。
有个 yield()函数和delay(0)功能相同。delayMicroseconds函数,在另一方面,不会为其他任务让步,所以当延时超过20ms时不推荐使用它。
串行 Serial
Serial 功能几乎和普通arduino一样,除了硬件FIFO (128 bytes for TX and RX)有额外256byte TX and RX缓冲区。传输和接收都是中断驱动。当FIFO和缓冲区分别为满和空时,读写功能将阻止程序的运行。
Serial 使用UART0,即引脚映射GPIO1(TX)和GPIO3(RX)。Serial.begin 之后调用Serial.swap()时,Serial引脚将映射到GPIO15(TX)和GPIO13(RX)。再次调用 swap时 引脚映射将回到GPIO1(TX)和GPIO3(RX)。
Serial1 使用UART1,TX引脚为GPIO2。UART1不能用来接收数据因为通常情况RX引脚被用到flash芯片连接了。使用Serail1,调用 Serial1.begin(baudrate)。
如果Serial1没有使用且Serial没有被调换 - 通过在Serial.begin之后调用Serial.set_tx(2)或者直接调用Serial.begin(baud,config,mode,2) 可以将UART0的TX映射到GPIO2。
默认情况下当你调用Serial.begin,Wifi库诊断输出是禁用的。再次启动调试输出,调用Serial.setDebugOutput(true)。调用Serial1.setDebugOutput(true),Serial1重定向调试输出。
你也需要使用Serial.setDebugOutput(true)去使能printf()函数的输出。
Serial和Serial1都支持 5,6,7,8数据位;奇 (O), 偶 (E),无(N) 校验位;1或2停止位。设置所需模式,调用Serial.begin(baudrate,SRIAL_8N1),Serial.begin(baudrate, SERIAL_6E2), etc.
Progmem
|
1
2
3
4
5
|
String response1;response1 += F("http:");...String response2;response2 += F("http:"); |
1点亮LED
//总共可用 0-15 16皆可IO pwm 输出 但是 6-11被系统时钟占用
//实际可用 0 1(TX) 2 3(RX) 4 5 12 13 14 15 16
// 一般RX TX留出
void setup() {
pinMode(BUILTIN_LED, OUTPUT); // Initialize the BUILTIN_LED pin as an output
pinMode(0, OUTPUT);
pinMode(1, OUTPUT);
pinMode(2, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(BUILTIN_LED, LOW); // Turn the LED on (Note that LOW is the voltage level
digitalWrite(0, LOW); // but actually the LED is on; this is because
digitalWrite(1, LOW); // it is acive low on the ESP-01)
digitalWrite(2, LOW);
delay(1000); // Wait for a second
digitalWrite(BUILTIN_LED, HIGH); // Turn the LED off by making the voltage HIGH
digitalWrite(0, HIGH); // but actually the LED is on; this is because
digitalWrite(1, HIGH); // it is acive low on the ESP-01)
digitalWrite(2, HIGH);
delay(2000); // Wait for two seconds (to demonstrate the active low LED)
}
2按键点亮LED
#define PIN_LED 16 //定义LED灯:PIN_LED所对应的引脚为16号
#define KEY_FLASH 0 //定义KEY_FLASH 对应0号引脚,其实就是FLASH按键位置
void setup() {
Serial.begin(115200);
Serial.setDebugOutput(true);
pinMode(PIN_LED, OUTPUT); //初始化PIN_LED引脚模式为输出
pinMode(KEY_FLASH, INPUT);//初始化Flash按键模式为输入
digitalWrite(PIN_LED,HIGH);//初始LED灯置为低电平,表示点亮
delay(1000); //延时1秒
}
//自定义按键函数
void keydo(){
//读出当前按键状态,0表示抬起断开,1为按下接通
int k;
k=digitalRead(KEY_FLASH);
Serial.println("
keydo:");
Serial.write(k);
Serial.println();
if(k==0)
digitalWrite(PIN_LED,HIGH); //高电平表示灯灭
else
digitalWrite(PIN_LED,LOW);
}
void loop() {
//digitalWrite(PIN_LED, LOW);
delay(500);
keydo();
//digitalWrite(PIN_LED, HIGH);
delay(500);
}
3生成PWM
#define PIN_LED 16
void setup() {
pinMode(PIN_LED, OUTPUT);
analogWrite(PIN_LED, 0);//模拟信号输出
}
void loop() {
for (int i = 0; i < 1024; i++)
{//电平升高,从明到暗
analogWrite(PIN_LED, i);
delay(2);
}
for (int i = 1024; i >= 0; i--)
{//电平降低,从暗到明
analogWrite(PIN_LED, i);
delay(2);
}
}
4控制舵机
/* Sweep
by BARRAGAN <http://barraganstudio.com>
This example code is in the public domain.
modified 28 May 2015
by Michael C. Miller
modified 8 Nov 2013
by Scott Fitzgerald
http://arduino.cc/en/Tutorial/Sweep
*/
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
void setup()
{
myservo.attach(2); // attaches the servo on GIO2 to the servo object
}
void loop()
{
int pos;
for(pos = 0; pos <= 180; pos += 1) // goes from 0 degrees to 180 degrees
{ // in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for(pos = 180; pos>=0; pos-=1) // goes from 180 degrees to 0 degrees
{
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
5 中断函数 需要上拉电阻 10k
//connect a jumper from GPIO 14 to ground to start test
#define GPIO_PIN 14
uint8_t led = LOW;
void setup(){
pinMode(GPIO_PIN, INPUT);
pinMode(BUILTIN_LED, OUTPUT);
setLED();
attachInterrupt(GPIO_PIN, highInterrupt, RISING);
}
void highInterrupt(){
led = HIGH;
detachInterrupt(GPIO_PIN);
attachInterrupt(GPIO_PIN, lowInterrupt, FALLING);
}
void lowInterrupt(){
led = LOW;
detachInterrupt(GPIO_PIN);
attachInterrupt(GPIO_PIN, highInterrupt, RISING);
}
void setLED(){
digitalWrite(BUILTIN_LED, led);
}
void loop(){
setLED();
}
示例2 不可用
引脚作为输入的声明是通过pinMode函数完成的,pinMode函数接收引脚作为第一个参数,并将第二个参数作为模式接收。
pinMode(interruptPin, INPUT_PULLUP);
最后,我们使用attachInterrupt函数将中断附加到引脚。它接收中断号码作为第一个参数,作为第二个参数的中断服务程序,以及第三个中断模式。
在第一个参数中,我们将使用 digitalPinToInterrupt函数,该函数接收中断引脚作为输入,将实际的数字引脚转换为特定的中断号[6]。
作为第二个参数,我们将通过我们将定义后者的处理函数。这个函数不能使用任何参数,也不会返回任何结果[6]。
作为第三个参数,我们可以通过3种支持的中断类型之一:CHANGE,RISING和FALLING [7]。在我们的情况下,我们不会检测到信号的下降沿,所以我们通过下降。
const byte interruptPin = 13; // 13 对应板载LED 2 对应433中断0
volatile byte interruptCounter = 0;
int numberOfInterrupts = 0;
void setup() {
Serial.begin(115200);
pinMode(interruptPin, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(interruptPin), handleInterrupt, FALLING);
}
void handleInterrupt() {
interruptCounter++;
}
void loop() {
if(interruptCounter>0){
interruptCounter--;
numberOfInterrupts++;
Serial.print("An interrupt has occurred. Total: ");
Serial.println(numberOfInterrupts);
}
}
6 通信433接收
//connect a jumper from GPIO 14 to ground to start test
#define GPIO_PIN 14 // 14--D5 不要上拉电阻
uint8_t led = LOW;
void setup(){
pinMode(GPIO_PIN, INPUT);
pinMode(BUILTIN_LED, OUTPUT);
setLED();
attachInterrupt(GPIO_PIN, highInterrupt, RISING);
}
void highInterrupt(){
led = HIGH;
detachInterrupt(GPIO_PIN);
attachInterrupt(GPIO_PIN, lowInterrupt, FALLING);
}
void lowInterrupt(){
led = LOW;
detachInterrupt(GPIO_PIN);
attachInterrupt(GPIO_PIN, highInterrupt, RISING);
}
void setLED(){
digitalWrite(BUILTIN_LED, led);
}
void loop(){
setLED();
}