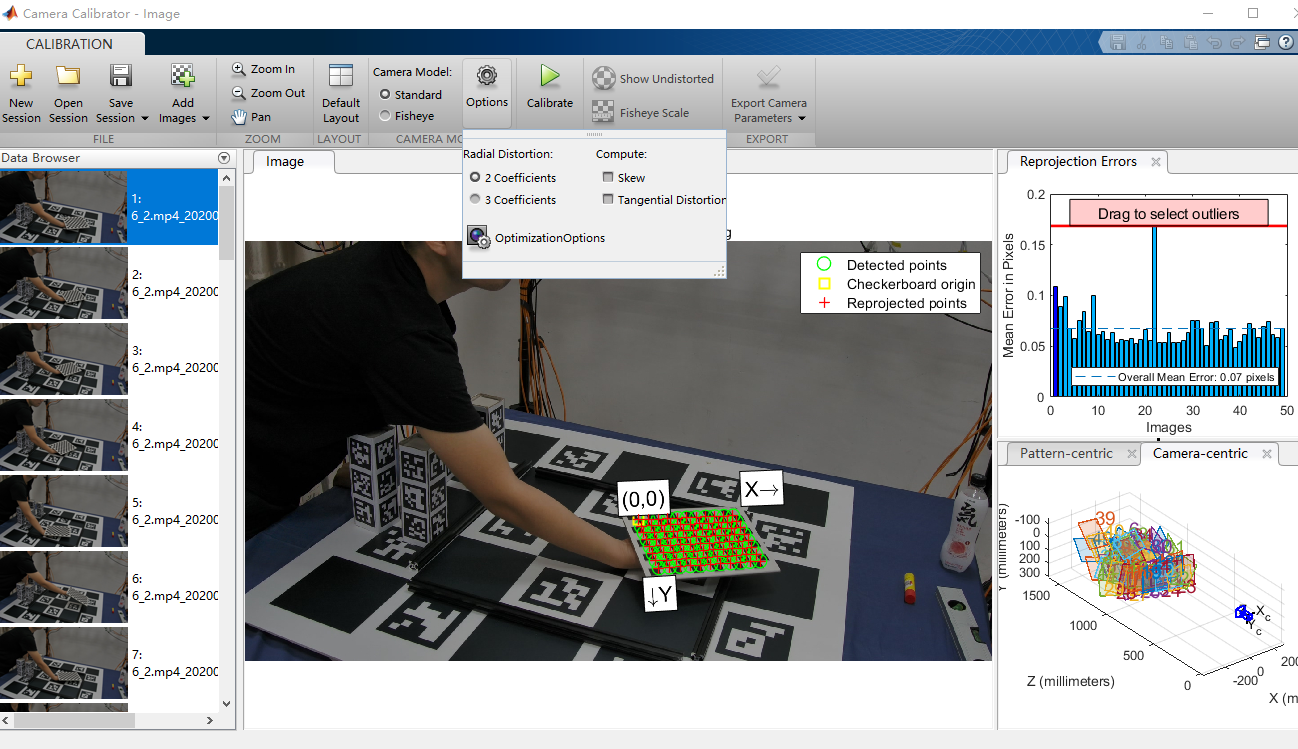
1 参数选择 径向畸变3个参数还是两个参数
默认两个参数
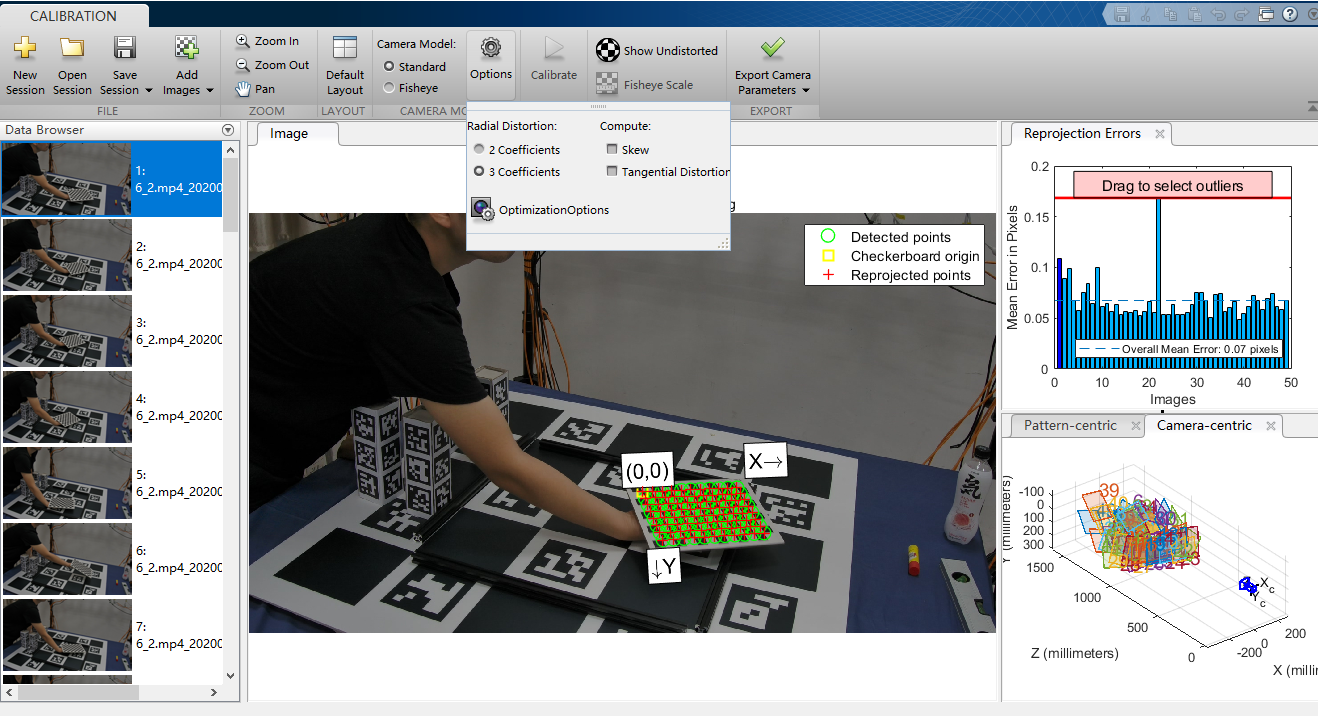
如果是三个参数
2准备转化生成结果


二参数的转化代码
writeExternalandIntrinsicMatrix(cameraParams62,'cameraParams622.xml');
function writeExternalandIntrinsicMatrix(cameraParams,file)
%writeXML(cameraParams,file)
docNode = com.mathworks.xml.XMLUtils.createDocument('opencv_storage');
docRootNode = docNode.getDocumentElement;
IntrinsicMatrix = ((cameraParams.IntrinsicMatrix)');
TangentialDistortion =cameraParams.TangentialDistortion;
%Distortion = [cameraParams.RadialDistortion(1:2),TangentialDistortion, cameraParams.RadialDistortion(3)];
Distortion = [cameraParams.RadialDistortion(1:2),TangentialDistortion,0];
FocalLength = cameraParams.FocalLength;
camera_matrix = docNode.createElement('IntrinsicCam'); %锟斤拷锟斤拷mat锟节碉拷
camera_matrix.setAttribute('type_id','opencv-matrix'); %锟斤拷锟斤拷mat锟节碉拷锟斤拷锟斤拷
rows = docNode.createElement('rows'); %锟斤拷锟斤拷锟叫节碉拷
rows.appendChild(docNode.createTextNode(sprintf('%d',3))); %锟斤拷锟斤拷锟侥憋拷锟节点,锟斤拷锟斤拷为锟叫碉拷锟接节碉拷
camera_matrix.appendChild(rows); %锟斤拷锟叫节碉拷锟斤拷为mat锟接节碉拷
cols = docNode.createElement('cols');
cols.appendChild(docNode.createTextNode(sprintf('%d',3)));
camera_matrix.appendChild(cols);
dt = docNode.createElement('dt');
dt.appendChild(docNode.createTextNode('d'));
camera_matrix.appendChild(dt);
data = docNode.createElement('data');
for i=1:3
for j=1:3
data.appendChild(docNode.createTextNode(sprintf('%.16f ',IntrinsicMatrix(i,j))));
end
data.appendChild(docNode.createTextNode(sprintf('
')));
end
camera_matrix.appendChild(data);
docRootNode.appendChild(camera_matrix);
distortion = docNode.createElement('DistortionCam');
distortion.setAttribute('type_id','opencv-matrix');
rows = docNode.createElement('rows');
rows.appendChild(docNode.createTextNode(sprintf('%d',1)));
distortion.appendChild(rows);
cols = docNode.createElement('cols');
cols.appendChild(docNode.createTextNode(sprintf('%d',5)));
distortion.appendChild(cols);
dt = docNode.createElement('dt');
dt.appendChild(docNode.createTextNode('d'));
distortion.appendChild(dt);
data = docNode.createElement('data');
for i=1:5
data.appendChild(docNode.createTextNode(sprintf('%.16f ',Distortion(i))));
end
distortion.appendChild(data);
docRootNode.appendChild(distortion);
focalLength = docNode.createElement('FocalLength');
focalLength.setAttribute('type_id','opencv-matrix');
rows = docNode.createElement('rows');
rows.appendChild(docNode.createTextNode(sprintf('%d',1)));
focalLength.appendChild(rows);
cols = docNode.createElement('cols');
cols.appendChild(docNode.createTextNode(sprintf('%d',1)));
focalLength.appendChild(cols);
dt = docNode.createElement('dt');
dt.appendChild(docNode.createTextNode('d'));
focalLength.appendChild(dt);
data = docNode.createElement('data');
for i=1:1
data.appendChild(docNode.createTextNode(sprintf('%.16f ',FocalLength(i))));
end
focalLength.appendChild(data);
docRootNode.appendChild(focalLength);
% distortion = docNode.createElement('Pmatrix');
% distortion.setAttribute('type_id','opencv-matrix');
% rows = docNode.createElement('rows');
% rows.appendChild(docNode.createTextNode(sprintf('%d',1)));
% distortion.appendChild(rows);
%
% cols = docNode.createElement('cols');
% cols.appendChild(docNode.createTextNode(sprintf('%d',4)));
% distortion.appendChild(cols);
%
% dt = docNode.createElement('dt');
% dt.appendChild(docNode.createTextNode('d'));
% distortion.appendChild(dt);
% data = docNode.createElement('data');
% for i=1:4
% data.appendChild(docNode.createTextNode(sprintf('%.16f ',Distortion(i))));
% end
% distortion.appendChild(data);
% docRootNode.appendChild(distortion);
xmlFileName = file;
xmlwrite(xmlFileName,docNode);
end
二参数的保存结果
<?xml version="1.0" encoding="utf-8"?>
<opencv_storage>
<IntrinsicCam type_id="opencv-matrix">
<rows>3</rows>
<cols>3</cols>
<dt>d</dt>
<data>1558.5669994681102253 0.0000000000000000 821.5211092415044050
0.0000000000000000 1557.8077127262038175 460.9748043702705331
0.0000000000000000 0.0000000000000000 1.0000000000000000
</data>
</IntrinsicCam>
<DistortionCam type_id="opencv-matrix">
<rows>1</rows>
<cols>5</cols>
<dt>d</dt>
<data>-0.1873006682834817 0.0171597428423078 0.0000000000000000 0.0000000000000000 0.0000000000000000 </data>
</DistortionCam>
<FocalLength type_id="opencv-matrix">
<rows>1</rows>
<cols>1</cols>
<dt>d</dt>
<data>1558.5669994681102253 </data>
</FocalLength>
</opencv_storage>
三参数的转化代码
function writeXML(cameraParams,file)
%writeXML(cameraParams,file)
%功能:将相机校正的参数保存为xml文件
%输入:
%cameraParams:相机校正数据结构
%file:xml文件名
%说明在xml文件是由一层层的节点组成的。
%首先创建父节点 fatherNode,
%然后创建子节点 childNode=docNode.createElement(childNodeName),
%再将子节点添加到父节点 fatherNode.appendChild(childNode)
docNode = com.mathworks.xml.XMLUtils.createDocument('opencv_storage'); %创建xml文件对象
docRootNode = docNode.getDocumentElement; %获取根节点
IntrinsicMatrix = (cameraParams.IntrinsicMatrix)'; %相机内参矩阵
RadialDistortion = cameraParams.RadialDistortion; %相机径向畸变参数向量1*3
TangentialDistortion =cameraParams.TangentialDistortion; %相机切向畸变向量1*2
Distortion = [RadialDistortion(1:2),TangentialDistortion,RadialDistortion(3)]; %构成opencv中的畸变系数向量[k1,k2,p1,p2,k3]
camera_matrix = docNode.createElement('camera-matrix'); %创建mat节点
camera_matrix.setAttribute('type_id','opencv-matrix'); %设置mat节点属性
rows = docNode.createElement('rows'); %创建行节点
rows.appendChild(docNode.createTextNode(sprintf('%d',3))); %创建文本节点,并作为行的子节点
camera_matrix.appendChild(rows); %将行节点作为mat子节点
cols = docNode.createElement('cols');
cols.appendChild(docNode.createTextNode(sprintf('%d',3)));
camera_matrix.appendChild(cols);
dt = docNode.createElement('dt');
dt.appendChild(docNode.createTextNode('d'));
camera_matrix.appendChild(dt);
data = docNode.createElement('data');
for i=1:3
for j=1:3
data.appendChild(docNode.createTextNode(sprintf('%.16f ',IntrinsicMatrix(i,j))));
end
data.appendChild(docNode.createTextNode(sprintf('
')));
end
camera_matrix.appendChild(data);
docRootNode.appendChild(camera_matrix);
distortion = docNode.createElement('distortion');
distortion.setAttribute('type_id','opencv-matrix');
rows = docNode.createElement('rows');
rows.appendChild(docNode.createTextNode(sprintf('%d',5)));
distortion.appendChild(rows);
cols = docNode.createElement('cols');
cols.appendChild(docNode.createTextNode(sprintf('%d',1)));
distortion.appendChild(cols);
dt = docNode.createElement('dt');
dt.appendChild(docNode.createTextNode('d'));
distortion.appendChild(dt);
data = docNode.createElement('data');
for i=1:5
data.appendChild(docNode.createTextNode(sprintf('%.16f ',Distortion(i))));
end
distortion.appendChild(data);
docRootNode.appendChild(distortion);
xmlFileName = file;
xmlwrite(xmlFileName,docNode);
end
三参数的转化保存结果
<?xml version="1.0" encoding="utf-8"?>
<opencv_storage>
<camera-matrix type_id="opencv-matrix">
<rows>3</rows>
<cols>3</cols>
<dt>d</dt>
<data>1558.6100144620272658 0.0000000000000000 821.6453269280840459
0.0000000000000000 1557.8120286433929778 460.8682816753835141
0.0000000000000000 0.0000000000000000 1.0000000000000000
</data>
</camera-matrix>
<distortion type_id="opencv-matrix">
<rows>5</rows>
<cols>1</cols>
<dt>d</dt>
<data>-0.1840928673709393 -0.0328189923757994 0.0000000000000000 0.0000000000000000 0.2205440258401062 </data>
</distortion>
</opencv_storage>