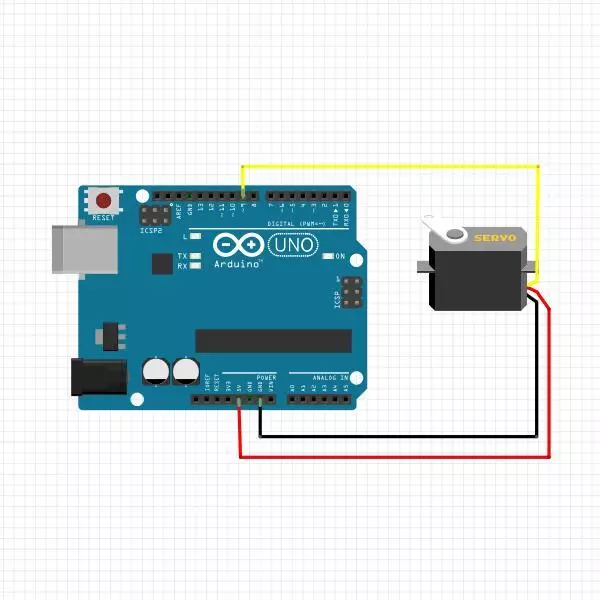
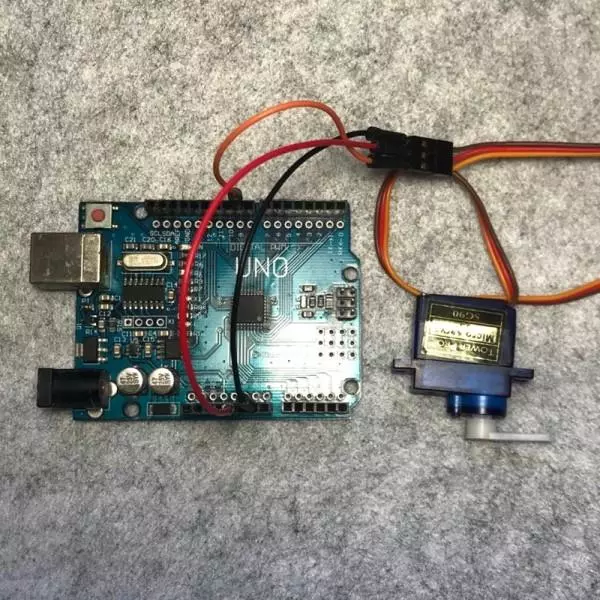
单路电机
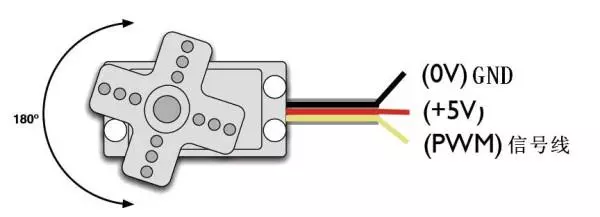
#include <Servo.h>
Servo myservo; // 定义Servo对象来控制
int pos = 0; // 角度存储变量
void setup() {
myservo.attach(9); // 控制线连接数字9
}
void loop() {
for (pos = 0; pos <= 180; pos ++) { // 0°到180°
// in steps of 1 degree
myservo.write(pos); // 舵机角度写入
delay(5); // 等待转动到指定角度
}
for (pos = 180; pos >= 0; pos --) { // 从180°到0°
myservo.write(pos); // 舵机角度写入
delay(5); // 等待转动到指定角度
}
}
额外说明: 对于360度舵机 不再是 0-180控制角度,90度停止 0一个方向最大速度转,180另一个方向最大速度转
myservo.write(80); //前转 myservo.write(90); //停止 myservo.write(90); //后转
串口获取消息
#include <Servo.h>
Servo myservo4;
Servo myservo5;
Servo myservo6;
void go4(){
myservo4.write(0);
delay(2000);
myservo4.write(90);
delay(1000);
}
void go5(){
myservo5.write(0);
delay(1000);
myservo5.write(90);
delay(1000);
myservo5.write(180);
delay(1000);
myservo5.write(90);
delay(1000);
myservo5.write(0);
delay(1000);
}
void go6(){
myservo6.write(0);
delay(1000);
myservo6.write(90);
delay(1000);
myservo6.write(180);
delay(1000);
myservo6.write(90);
delay(1000);
myservo6.write(0);
delay(1000);
}
void do_motor(String comdata){
if(comdata=="motor1"){
go4();
}
else if(comdata=="motor2"){
go5();
}
else if(comdata=="motor3"){
go6();
}
else{}
}
void setup() {
//硬串口
Serial.begin(9600);
myservo4.attach(4);
myservo5.attach(5);
myservo6.attach(6);
myservo4.write(90);//S舵机不一样 90代表停止
myservo5.write(0);//普通舵机 初始化0位置
myservo6.write(0);//普通舵机 初始化0位置
}
String comdata;
void loop() {
if(Serial.available()>0){
comdata = Serial.readString();
Serial.println(comdata);
do_motor(comdata);
comdata = "";
}
}
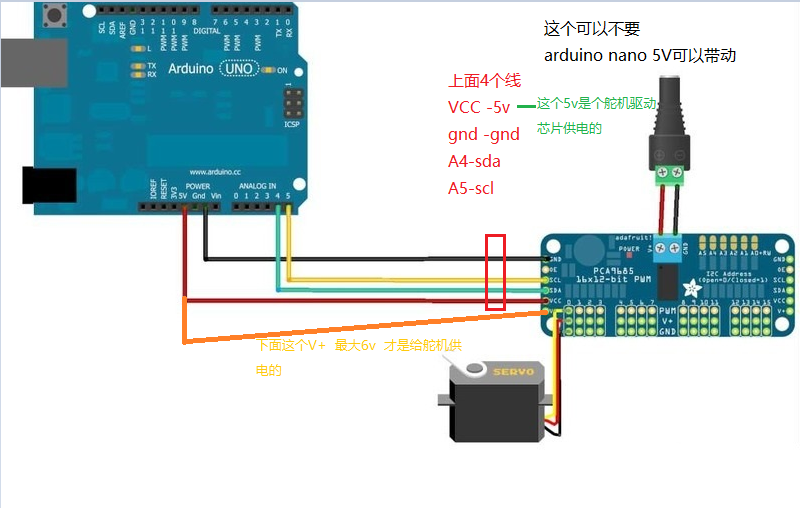
16路电机
由于Arduino的驱动能力有限,当需要控制多个舵机时,需要外接电源以及使用专用的舵机控制板。
https://item.taobao.com/item.htm?spm=a1z09.2.0.0.435e2e8dKDHquW&id=536890985912&_u=21qf7bf5b2a1

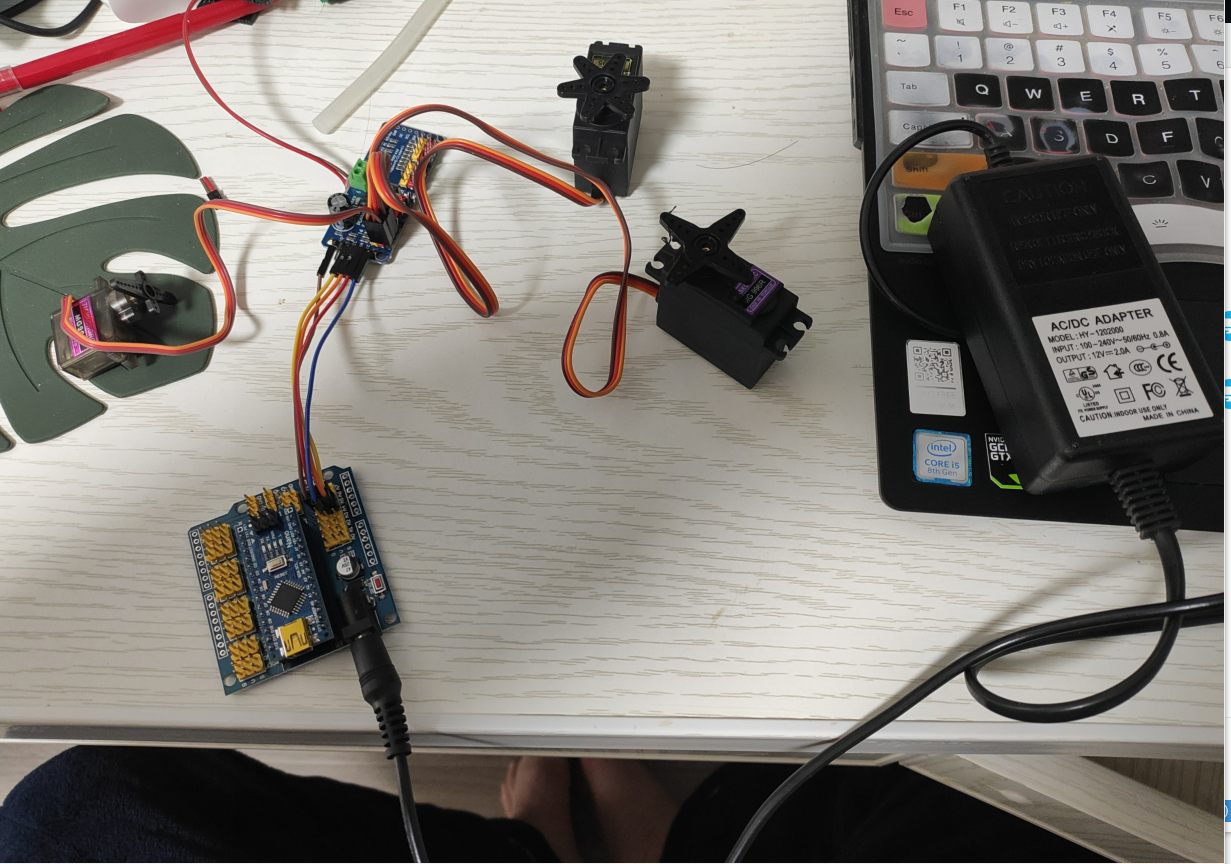
无论是电脑USB供电还是专门12v-2A供电 都可以
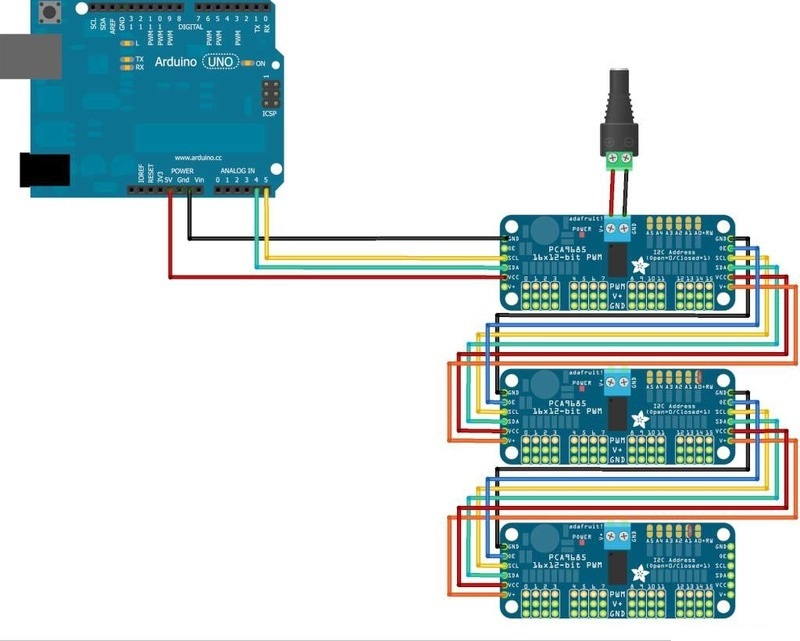
板子可以级练控制多个
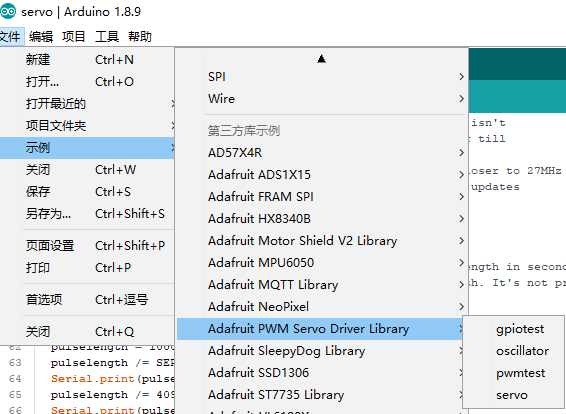
安装库
/***************************************************
This is an example for our Adafruit 16-channel PWM & Servo driver
Servo test - this will drive 8 servos, one after the other on the
first 8 pins of the PCA9685
Pick one up today in the adafruit shop!
------> http://www.adafruit.com/products/815
These drivers use I2C to communicate, 2 pins are required to
interface.
Adafruit invests time and resources providing this open source code,
please support Adafruit and open-source hardware by purchasing
products from Adafruit!
Written by Limor Fried/Ladyada for Adafruit Industries.
BSD license, all text above must be included in any redistribution
****************************************************/
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
// called this way, it uses the default address 0x40
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
// you can also call it with a different address you want
//Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(0x41);
// you can also call it with a different address and I2C interface
//Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(0x40, Wire);
//根据您的伺服品牌,最小和最大脉冲宽度可能会有所不同 调整它
#define SERVOMIN 150 // This is the 'minimum' pulse length count (out of 4096)
#define SERVOMAX 600 // This is the 'maximum' pulse length count (out of 4096)
#define SERVO_FREQ 50 // Analog servos run at ~50 Hz updates
// our servo # counter
uint8_t servonum = 0;
void setup() {
Serial.begin(9600);
Serial.println("8 channel Servo test!");
pwm.begin();
//理论上内部振荡器是25MHz,但实际上不是
//非常精确。你可以调整这个数字直到
//你得到了你期望的频率!
pwm.setOscillatorFrequency(27000000); // The int.osc. is closer to 27MHz
pwm.setPWMFreq(SERVO_FREQ); // Analog servos run at ~50 Hz updates
delay(10);
}
void loop() {
Serial.println(servonum);
for (uint16_t pulselen = SERVOMIN; pulselen < SERVOMAX; pulselen++) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
for (uint16_t pulselen = SERVOMAX; pulselen > SERVOMIN; pulselen--) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
servonum++;
if (servonum > 3) servonum = 0; // Testing the first 8 servo channels
}
/***************************************************
This is an example for our Adafruit 16-channel PWM & Servo driver
Servo test - this will drive 8 servos, one after the other on the
first 8 pins of the PCA9685
Pick one up today in the adafruit shop!
------> http://www.adafruit.com/products/815
These drivers use I2C to communicate, 2 pins are required to
interface.
Adafruit invests time and resources providing this open source code,
please support Adafruit and open-source hardware by purchasing
products from Adafruit!
Written by Limor Fried/Ladyada for Adafruit Industries.
BSD license, all text above must be included in any redistribution
****************************************************/
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
// called this way, it uses the default address 0x40
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
// you can also call it with a different address you want
//Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(0x41);
// you can also call it with a different address and I2C interface
//Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(0x40, Wire);
// Depending on your servo make, the pulse width min and max may vary, you
// want these to be as small/large as possible without hitting the hard stop
// for max range. You'll have to tweak them as necessary to match the servos you
// have!
#define SERVOMIN 150 // This is the 'minimum' pulse length count (out of 4096)
#define SERVOMAX 600 // This is the 'maximum' pulse length count (out of 4096)
#define USMIN 600 // This is the rounded 'minimum' microsecond length based on the minimum pulse of 150
#define USMAX 2400 // This is the rounded 'maximum' microsecond length based on the maximum pulse of 600
#define SERVO_FREQ 50 // Analog servos run at ~50 Hz updates
// our servo # counter
uint8_t servonum = 0;
void setup() {
Serial.begin(9600);
Serial.println("8 channel Servo test!");
pwm.begin();
// In theory the internal oscillator is 25MHz but it really isn't
// that precise. You can 'calibrate' by tweaking this number till
// you get the frequency you're expecting!
pwm.setOscillatorFrequency(27000000); // The int.osc. is closer to 27MHz
pwm.setPWMFreq(SERVO_FREQ); // Analog servos run at ~50 Hz updates
delay(10);
}
// You can use this function if you'd like to set the pulse length in seconds
// e.g. setServoPulse(0, 0.001) is a ~1 millisecond pulse width. It's not precise!
void setServoPulse(uint8_t n, double pulse) {
double pulselength;
pulselength = 1000000; // 1,000,000 us per second
pulselength /= SERVO_FREQ; // Analog servos run at ~60 Hz updates
Serial.print(pulselength); Serial.println(" us per period");
pulselength /= 4096; // 12 bits of resolution
Serial.print(pulselength); Serial.println(" us per bit");
pulse *= 1000000; // convert input seconds to us
pulse /= pulselength;
Serial.println(pulse);
pwm.setPWM(n, 0, pulse);
}
void loop() {
// Drive each servo one at a time using setPWM()
Serial.println(servonum);
for (uint16_t pulselen = SERVOMIN; pulselen < SERVOMAX; pulselen++) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
for (uint16_t pulselen = SERVOMAX; pulselen > SERVOMIN; pulselen--) {
pwm.setPWM(servonum, 0, pulselen);
}
delay(500);
// Drive each servo one at a time using writeMicroseconds(), it's not precise due to calculation rounding!
// The writeMicroseconds() function is used to mimic the Arduino Servo library writeMicroseconds() behavior.
for (uint16_t microsec = USMIN; microsec < USMAX; microsec++) {
pwm.writeMicroseconds(servonum, microsec);
}
delay(500);
for (uint16_t microsec = USMAX; microsec > USMIN; microsec--) {
pwm.writeMicroseconds(servonum, microsec);
}
delay(500);
servonum++;
if (servonum > 3) servonum = 0; // Testing the first 8 servo channels
}
不使用扩展版
#include <Servo.h>
Servo myservo; // create servo object to control a servo
Servo myservo1;
int pos = 0; // variable to store the servo position
void setup()
{
Serial.begin(9600);
myservo.attach(9); // attaches the servo on pin 9 to the servo object
myservo.write(90);
myservo1.attach(7);
delay(15);
}
void loop()
{
char ch = Serial.read();
switch(ch){
case 's':
{
myservo.write(80);
delay(1000);
Serial.println("N is inputed");
myservo.write(90);
myservo1.write(0);
delay(1000);
break;
}
case 'n':
{
myservo.write(100);
delay(1000);
Serial.println("S is inputed");
myservo.write(90);
myservo1.write(180);
delay(1000);
break;
}
}
}