E-puck2 完整电气通信架构图如下:

该机器人是具有USB集线器,编程器/调试器(413),主处理器(407)和WiFi / BT模块(ESP32)的完整系统
e-puck2机器人具有3个板载芯片:
- 主微控制器(407):负责处理传感器和执行器,并运行演示/算法
e-puck2机器人主微控制器是一个32位STM32F407,它以168 MHz(210DMIPS)的频率运行,并具有DSP,FPU和DMA功能。为e-puck2选择的版本具有192 KB的总RAM和1024 KB的闪存,因此需要大量内存。
- 编程接口(413):提供编程/调试功能,而且它配置USB集线器,负责电源管理(机器人的开/关和电池测量)
- 无线模块(EPS32):负责处理无线通信(WiFi,BLE,BT),RGB LED和用户按钮(由于主微控制器上的引脚数限制,RGB LED和按钮连接到无线电模块)
机器人出厂时已经在所有3个芯片上烧录了最后一个固件版本,因此您可以无需再次烧录程序就开始使用机器人了。
以下部分介绍了机器人的基本用法,所有用户都应完整阅读这篇文章,以便准备好与e-puck2机器人一起使用的最小工作系统。某些部分将提供更详细的信息,可以通过提供的链接阅读。必要时,为所有平台(Windows,Linux,Mac)提供专用信息。为Linux提供的命令与Ubuntu发行版有关,类似的命令在其他发行版中也可用。
打开/关闭机器人
要打开机器人,您需要按下放置在电路板底部靠近扬声器的电源按钮(蓝色按钮),如下图所示:


要关闭机器人,您需要按下电源按钮1秒钟。
LED的含义
e-puck2有三组LED,用户无法控制。
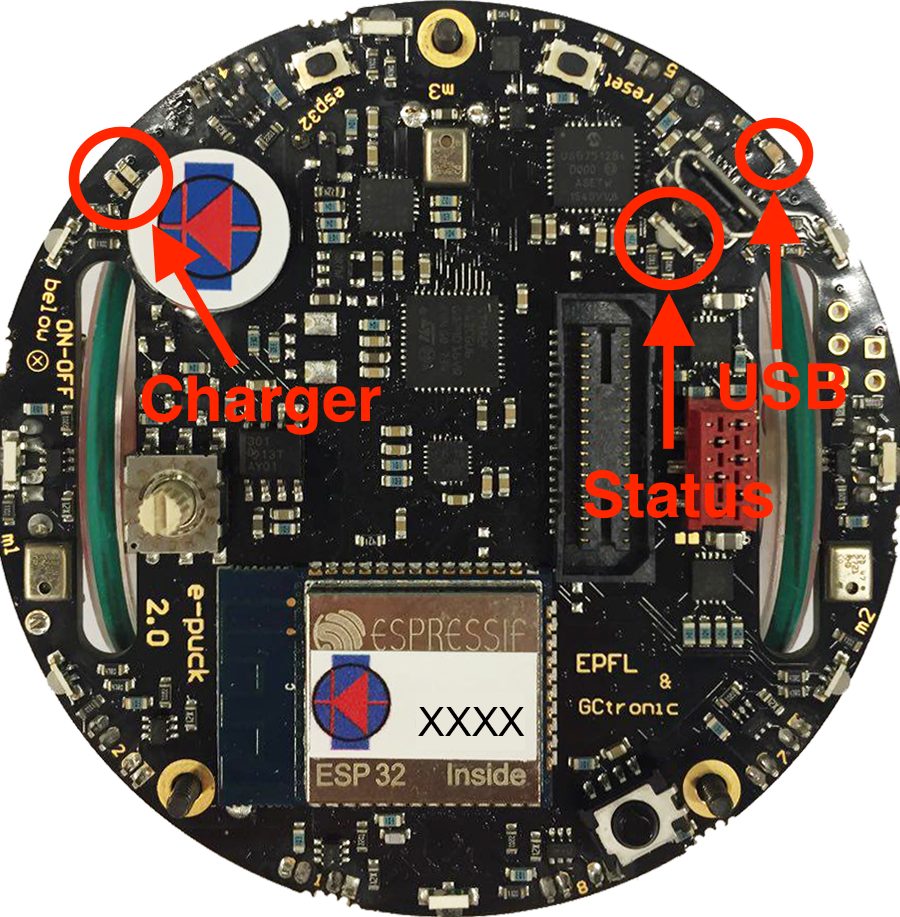
- charger:充电时为红色,充电完成时为绿色,如果发生错误则为红色和绿色
- USB:如果e-puck2检测到与计算机的USB连接,则打开
- Status:机器人开启时打开,机器人关闭时关闭。 打开时,指示电池的电量。 如果程序在调试会话期间运行,也会闪烁绿色。
电池电量指示(STATUS RGB LED):
- 如果系统的电池电量大于3.5V,则为绿色
- 如果系统的电池电量介于3.5V和3.4V之间,则为ORANGE
- 如果系统的电池电量在3.4V和3.3V之间,则为红色
- 如果系统的电池电量低于3.3V,则红色闪烁
如果系统的电池电量在10秒内低于3.2V,机器人将自动关闭。
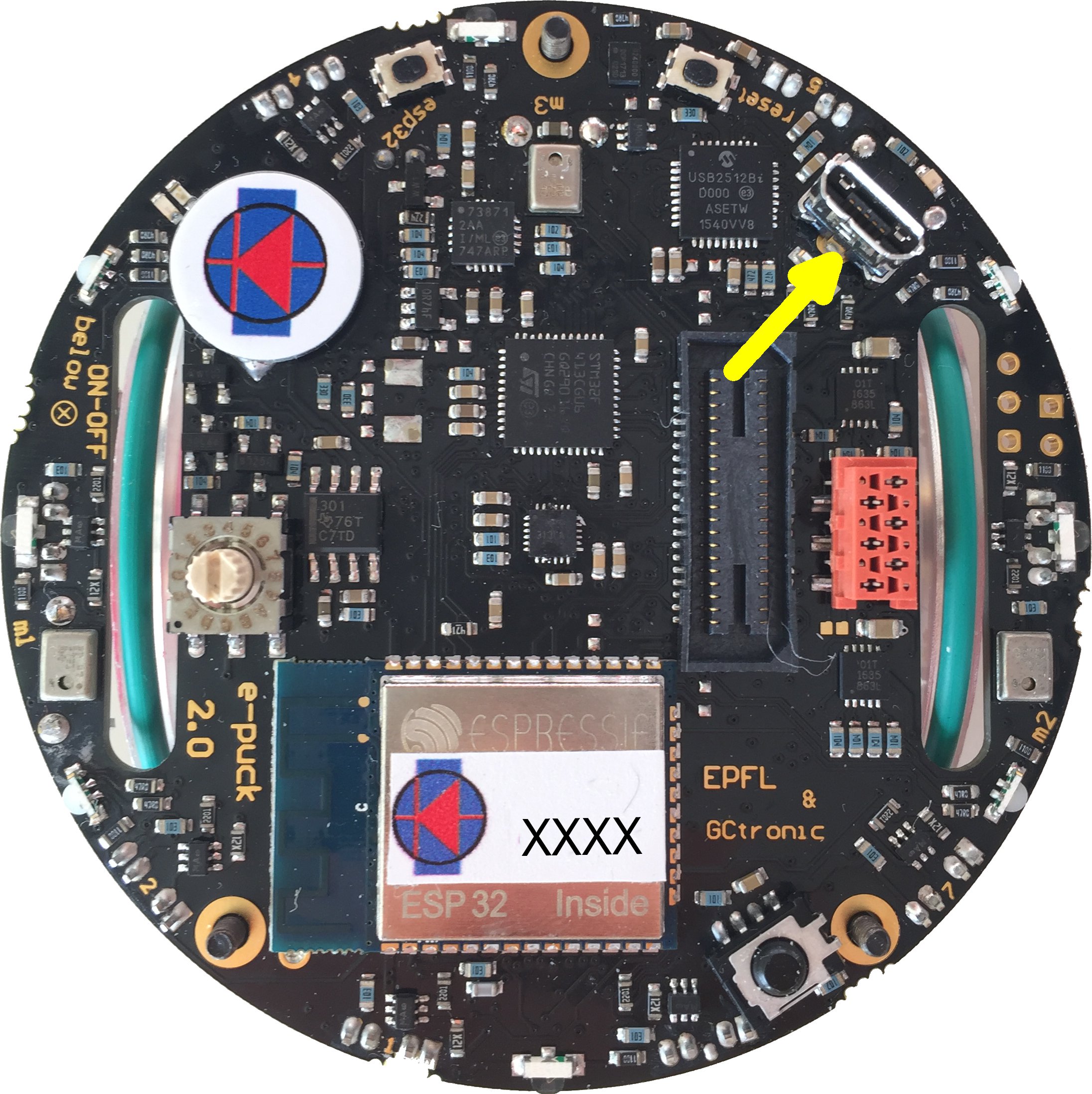
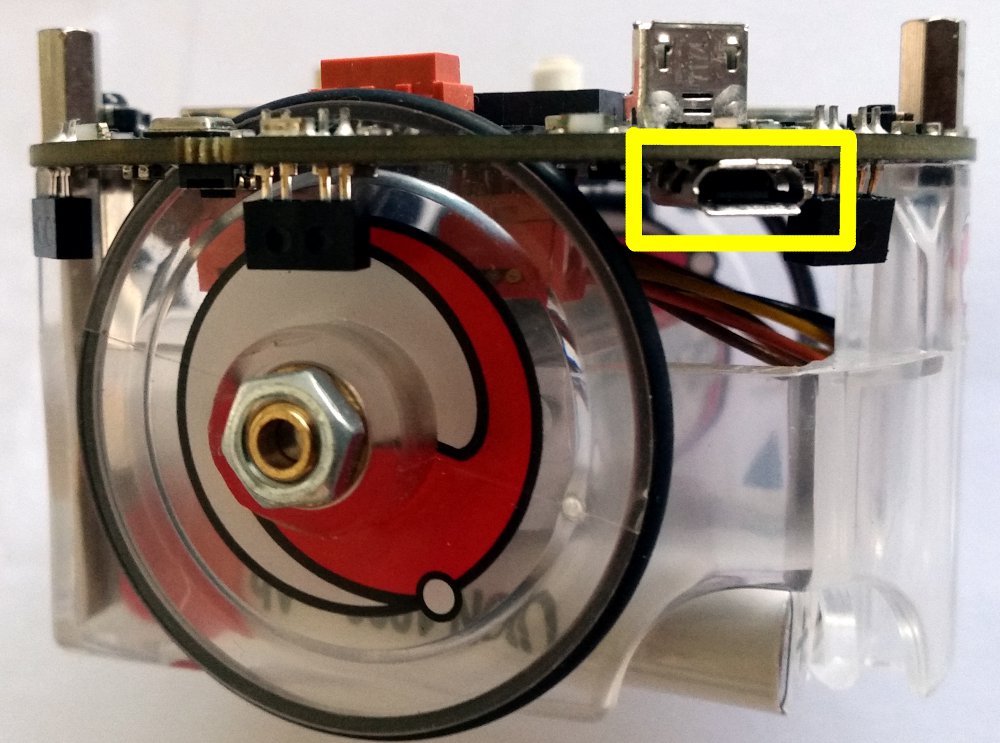
连接USB
需要使用微型USB电缆(包装中附带机器人)将机器人连接到计算机。 有两个连接器,一个放在机器人顶部朝上,另一个放在机器人侧面,如下图所示。 两者均可用于为机器人充电(最高1安培)或与之通信,但不能同时连接两根电缆。 可以将USB线连接到您认为更舒适的地方。