程序猿
程序猿
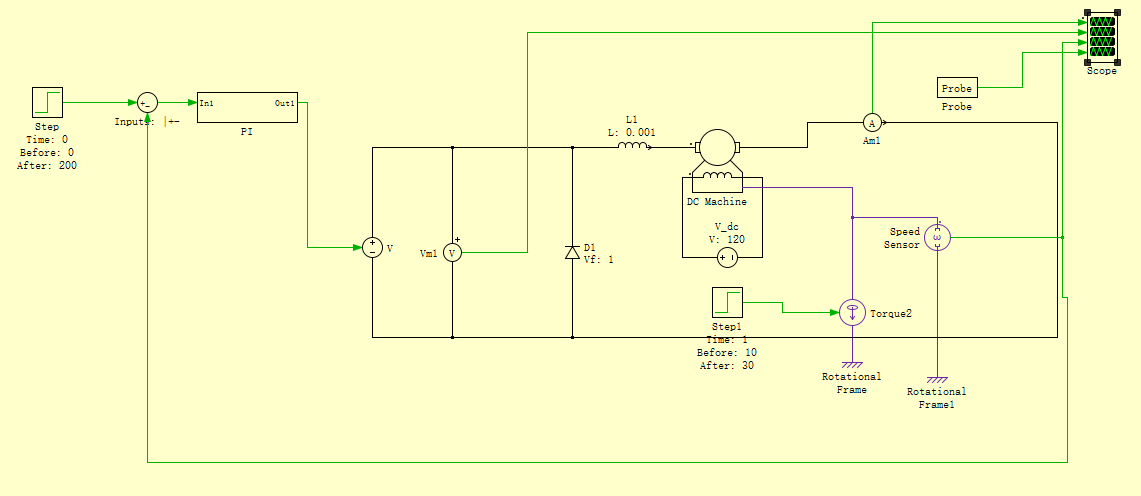
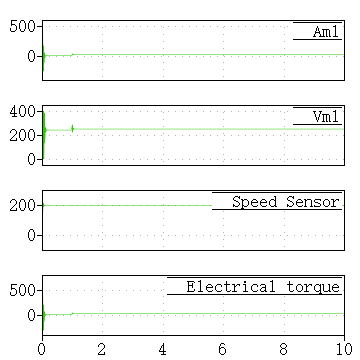
第11周仿真作业
1.
PI控制器
稳态误差为2.5rad/s
2.
3.
【推广】
免费学中医,健康全家人
原文地址:https://www.cnblogs.com/kankannipingge/p/6919422.html
推荐文章
同源策略及跨域问题
反向代理的实现原理
Jsonp的原理
原生js发送Ajax请求
keyup事件、keydown事件和input事件的区别
change事件和input事件的区别
jquery的优点
JavaScript 中 new 关键字结合构造函数创建对象
JavaScript 闭包
JavaScript 的数据类型
安全漏洞概述(一)
实验吧writeup
java反射机制
真正入坑的第一天、、、
【洛谷1282】多米诺骨牌
【CodeVS3372】选学霸
【NOIP2011】瑞士轮
【CodeVS2860】阶乘末尾的零
【CodeVS1056】圆内三角形统计
【NOIP2004】火星人
【背包问题】
【CodeVS1037】取数游戏
【CodeVS2226】飞行棋
网线主管
第一周计划
毕业设计每日总结2020/2/16
毕业设计每日总结2020/2/15
毕业设计每日总结2020/2/14
毕业设计每日总结2020/2/13
毕业设计每日总结2020/2/12