title: 搭建qt+ros的开发环境(一)
date: 2020-07-07 21:51:03
tags: 记录
最近需要开发用于ROS人机交互界面的开发,一直在折腾Qt所以记录一下环境的搭建
安装Qt for ros插件的可以看我上一篇blog: ubuntu14搭建QT+ros_qtc_plugin
打开Qt 5.9.1Creator(这是我ubuntu14系统之前安装qt57creator-plugin-ros带上的)
左上角 File --> New File or Project
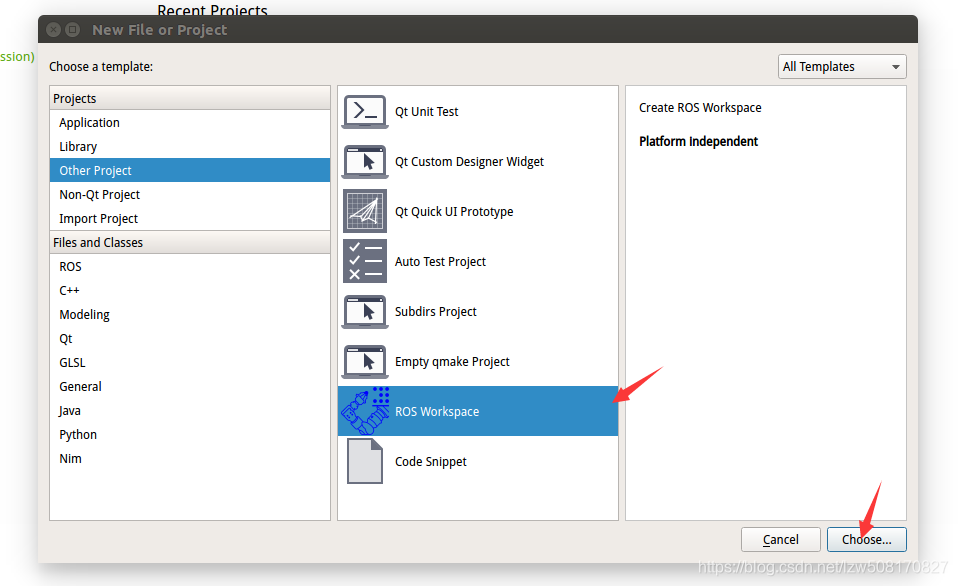
下一步,在 version control 那一项我选择<none>
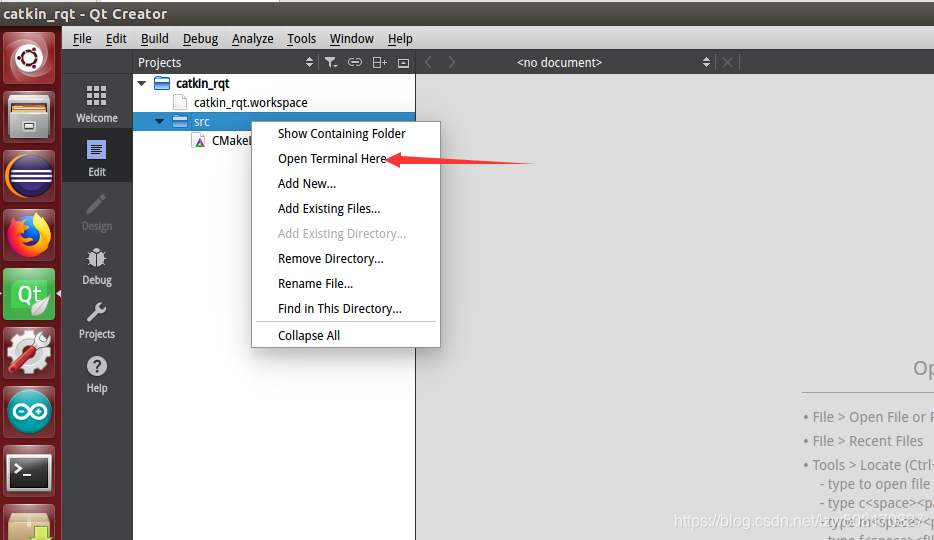
创建两个package。
catkin_create_pkg topic_pkg std_msgs roscpp
catkin_create_qt_pkg gui_pkg
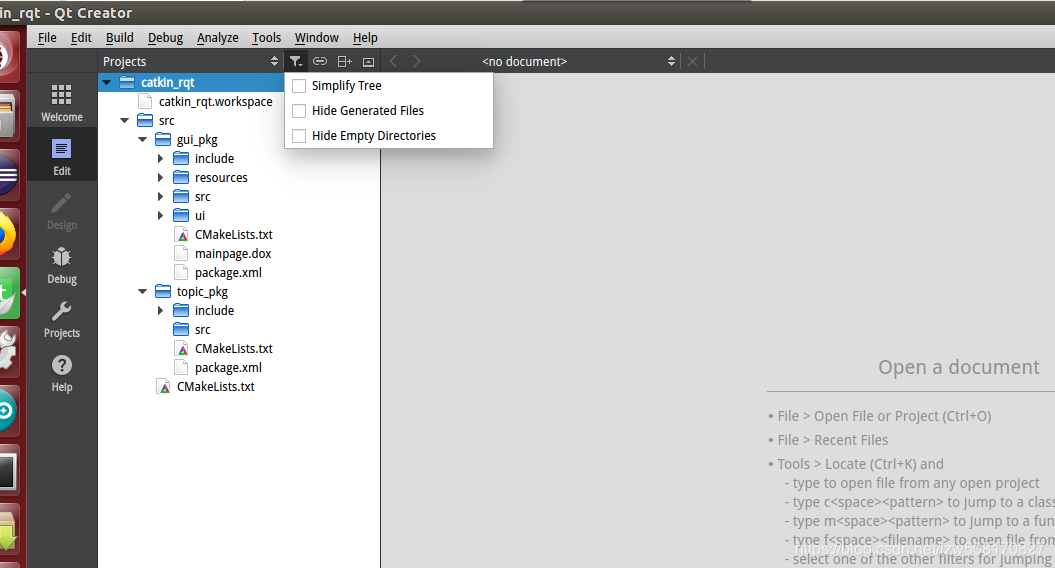
如果左侧列表有文件少了,重启一下Qtcreator并且按这样设置。
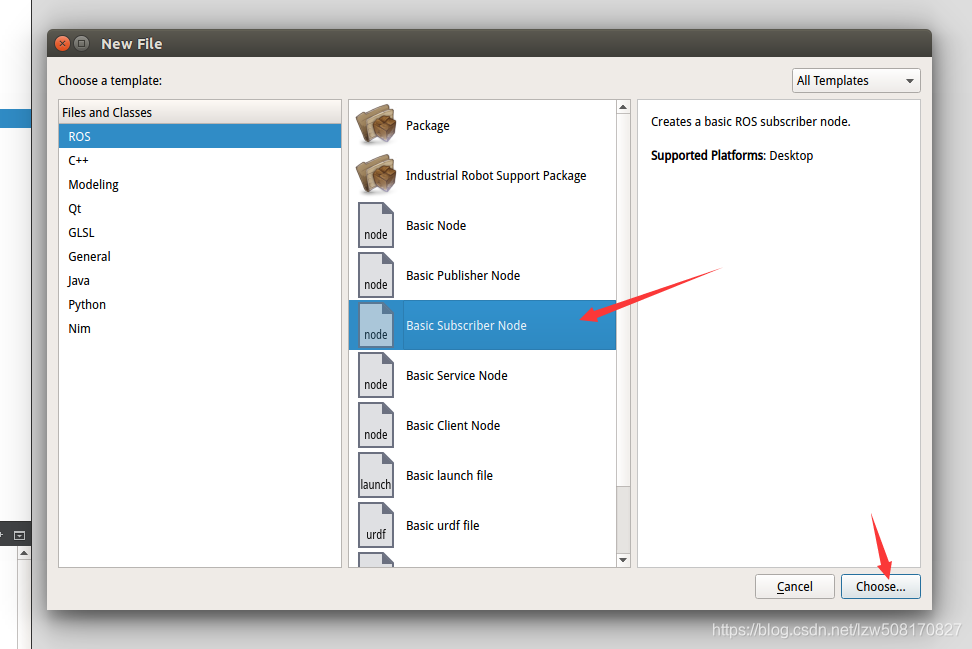
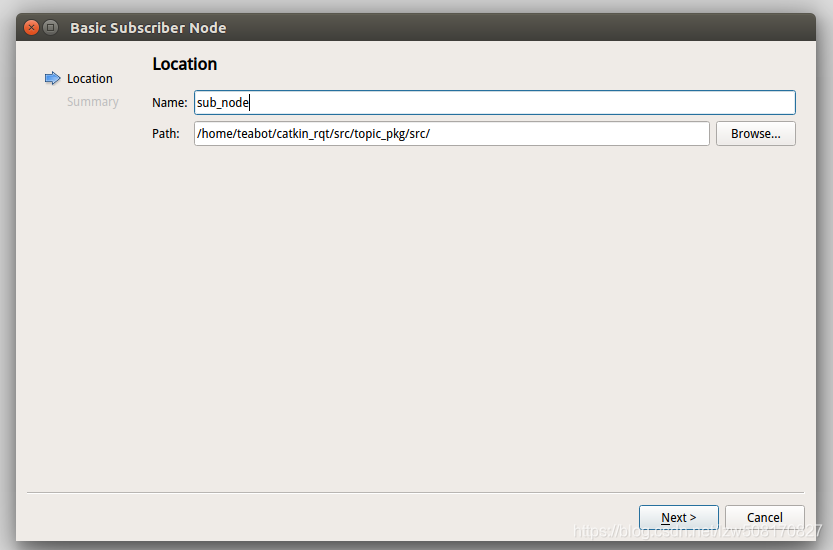
添加节点
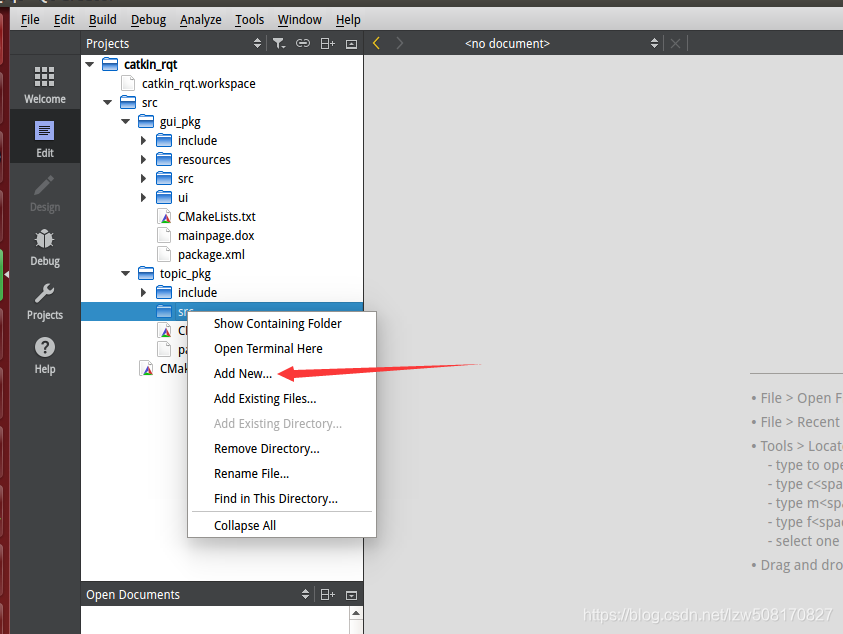
修改对应的CMakeList文件
add_executable(sub_node src/sub_node.cpp)
target_link_libraries(sub_node ${catkin_LIBRARIES})
点击左下角锤子编译。
添加待会测试要运行的节点。
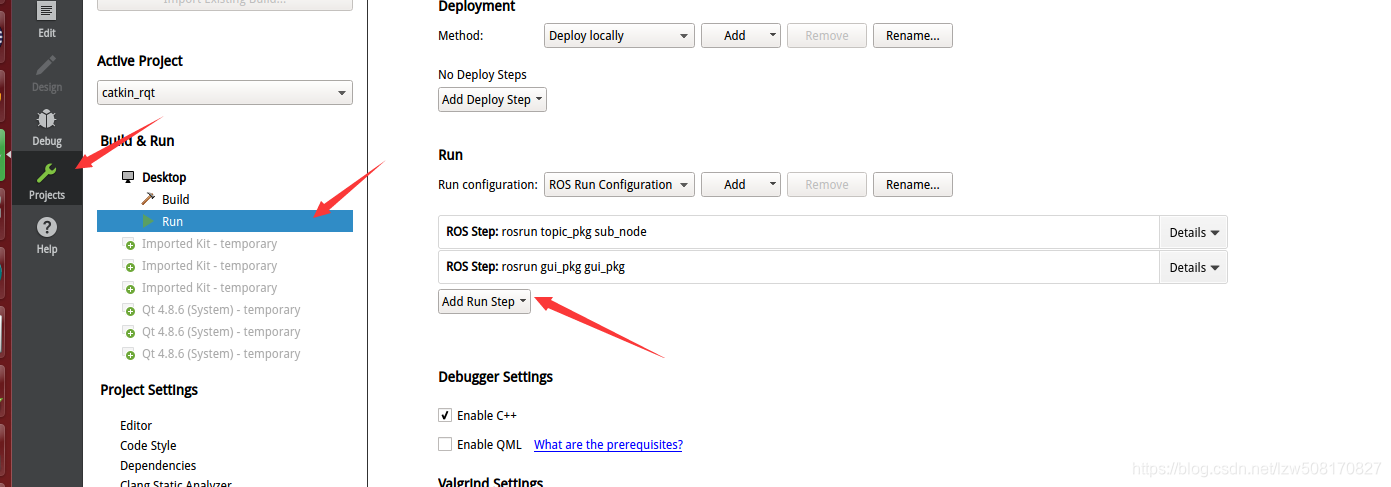
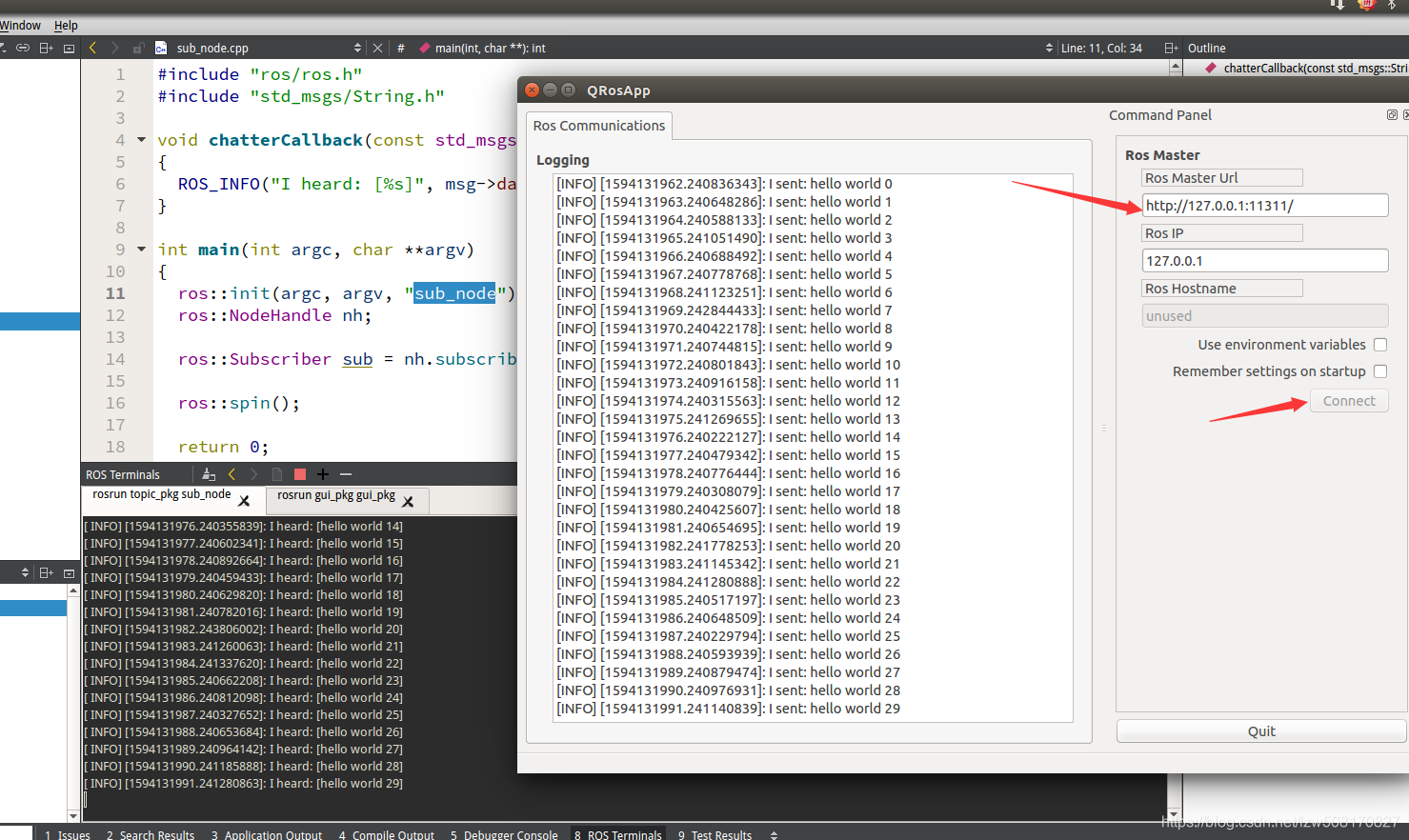
运行roscore,点击左侧绿色三角运行创建的两个节点。
输入rosmaster的URL,搭建完成。
参考链接: