opencv的实用研究--分析轮廓并寻找边界点
轮廓是图像处理中非常常见的。对现实中的图像进行采样、色彩变化、灰度变化之后,能够处理得到的是“轮廓”。它直接地反应你了需要分析对象的边界特征。而对轮廓的分析,实际上也就是对原图像特征的分析。
在Opencv中,已经实现了基础的轮廓算法,但是相比较于比如halcon这样的专业软件,在轮廓处理这块的功能还是比较缺乏的。这里就通过一个具体问题,说明自己的学习研究。不对之处欢迎批评。
P.S这里的轮廓处理相关函数,已经包涵在GOBase中,具体可以到公告中找Github.
一、问题提出
那么如果对于一个简单的图像,比如
已经获得了最大物体的轮廓,比如
//灰度域变化
threshold(gray,gray,0,255,THRESH_BINARY_INV);
GaussianBlur(gray,gray,Size(3,3),0,0);
//寻找和绘制轮廓
VP bigestContour = FindBigestContour(gray);
contours.push_back(bigestContour); 
由于在opencv里面,轮廓是以 保存的,那么如何获得这个轮廓的四个顶点了?
- vector<vector<point>>
尝试直接打印轮廓中第一个点,那么的确是左上角

但是不具有通用性,在一些比较复杂的图片上面效果不行,比如

那么也就是说,必须通过特征分析的方法获得已经获得的轮廓中点的特性,而opencv本身没有提供相关功能。
二、直观的解决
现在,对于“左上”和“右下”的两个点,是比较好分析的。因为在所有的包含在轮廓中的点中,他们一个是x,y同时最小的,一个是x,y同时最大的。
比较复杂的是“左下”和"右上"两个点,因为他们的数值不是非常有特征,比较容易产生混淆。这个时候,如果仅仅是通过x,y值来分析,即使是对于简单图像,也很难得到稳定的结果。
- int itopleft =65535;
int idownright =0;
Point ptopleft;
Point pdownright;
Point pdownleft;
for(int i=0;i<bigestContour.size();i++){
//左上
if(bigestContour[i].x + bigestContour[i].y <itopleft){
itopleft = bigestContour[i].x + bigestContour[i].y ;
ptopleft = bigestContour[i];
}
//右下
if(bigestContour[i].x+bigestContour[i].y>idownright){
idownright = bigestContour[i].x+bigestContour[i].y;
pdownright = bigestContour[i];
}
}
int idownleft =65534;
//对于左下的点来说,应该是所有y大于左上的点中,x最小的
for(int i=0;i<bigestContour.size();i++){
if(bigestContour[i].y>ptopleft.y){
if(bigestContour[i].x<idownleft){
idownleft = bigestContour[i].x;
pdownleft = bigestContour[i];
}
}
}
//绘制
circle(board,ptopleft,10,Scalar(255),5);
circle(board,pdownright,10,Scalar(255),5);
circle(board,pdownleft,10,Scalar(255),5);
三、利用模型来解决
那么,直观的方法是不稳定的。这个时候,我想到在进行图像处理的时候,有所谓“特征点”的说法。比较常见的比如harris/shift/surf。那么我是否能够通过分析轮廓图像,找到轮廓图像特征点的方法找到我需要的边角了?
编码实现:
///在board上寻找角点
///// Detector parameters
int blockSize = 2;
int apertureSize = 3;
double k = 0.04;
int thresh = 1;
/// Detecting corners
board.convertTo(board,CV_32F);
cornerHarris( board,dst,2,3,0.04);
///// Normalizing
normalize( dst, dst_norm, 0, 255, NORM_MINMAX, CV_32FC1, Mat() );
convertScaleAbs( dst_norm, dst_norm_scaled );
///// Drawing a circle around corners
for( int j = 0; j < dst_norm.rows ; j++ ) {
for( int i = 0; i < dst_norm.cols; i++ ) {
if( (int) dst_norm.at<float>(j,i) > thresh ) {
circle( dst_norm_scaled, Point( i, j ), 5, Scalar(0), 2, 8, 0 );
circle(src,Point( i, j ), 5, Scalar(255,0,0), -1, 8, 0 );
}
}得到结果

NICE,在图像中已经明显的显示出来了4个边界点,再加上已经有的两个点,得到结果不成问题。
四、问题进一步研究
但是这里其实是用了一个“投机取巧”的方法,那就是使用图像处理的才使用的harris算法来分析轮廓。opencv默认实现的harris速度慢且会内存移除。用在这个简单的例子里面看似可以,但是无法处理现实问题。所以就必须分析原理。
做图像处理有一段时间了,我经常反思回忆,在图像处理中,能够稳定解决问题的,往往依靠的是“先验知识,本质特征”;越是分析逼近图像的本质特征,越能够发现稳定的解决方法。比如对于轮廓的角来说,很容易想到处于边角的点和两边的点肯定具有一定的关系,而这种关系具有特征性。
所以有目的地寻找论文,很快就有了成果:








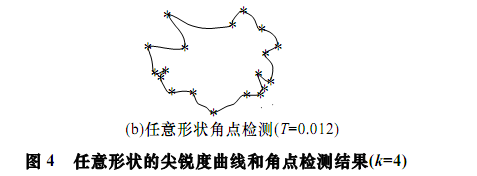
对于我的研究来说,这篇论文两个贡献:一个是告知首先要对图像进行高斯模糊,这个是我之前没有想到的。特别是对于现实世界中的轮廓,这种方法效果很好。因为边角经过模糊,那么还是边角,但毛刺经过模糊,能够有效去除。
论文中的算法实现是比较简单的,并且给出了简化算法,直接编码验证:
- //遍历轮廓,求出所有支撑角度
int icount = bigestContour.size();
float fmax = -1;//用于保存局部最大值
int imax = -1;
bool bstart = false;
for (int i=0;i<bigestContour.size();i++){
Point2f pa = (Point2f)bigestContour[(i+icount-7)%icount];
Point2f pb = (Point2f)bigestContour[(i+icount+7)%icount];
Point2f pc = (Point2f)bigestContour[i];
//两支撑点距离
float fa = getDistance(pa,pb);
float fb = getDistance(pa,pc)+getDistance(pb,pc);
float fang = fa/fb;
float fsharp = 1-fang;
if (fsharp>0.05){
bstart = true;
if (fsharp>fmax){
fmax = fsharp;
imax = i;
}
}else{
if (bstart){
circle(board,bigestContour[imax],10,Scalar(255),1);
circle(src,bigestContour[imax],10,Scalar(255,255,255),1);
imax = -1;
fmax = -1;
bstart = false;
}
}
}
编码过程中,相比较于原文,有两处优化(原文中应该也提到了,但是没有明说):一是通过取模,使得所有的轮廓点都参与运算;二是通过比较,取出角点的局部最大值。
实现效果,比较理想:

五、小结反思
1、掌握知识,如果不能归纳数学模型,并且编码实现,不叫真正掌握;
2、分析研究,如果从简单的情况开始,控制变量,往往能够左右逢源。
您好,测试的图片是这样的,需要把图片里的2段圆弧与2条直线分割出来,《基于轮廓尖锐度的图像角点检测算法》所实现的算法,不清楚能不能实现
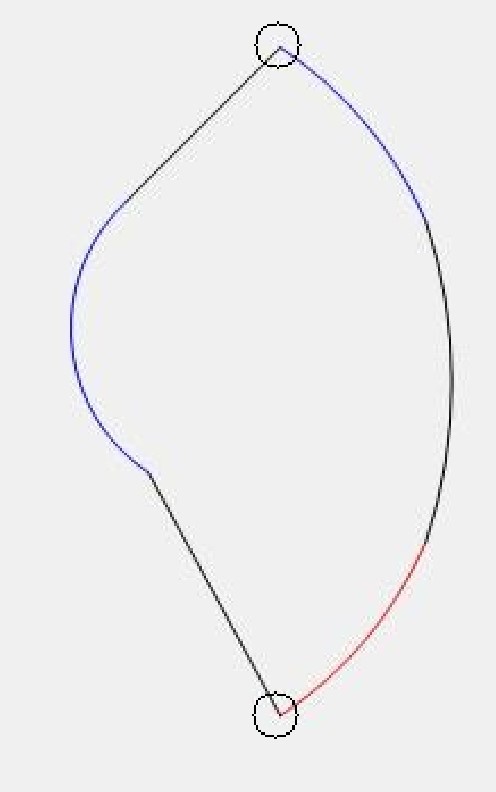
这个结果进行处理的话,根据“支撑点”的基本定义,应该只能够得到这样的结果:
如果后面关于圆弧和直线的区分,可能要做斜率研究,较为适宜。
附上全部代码:
#include <opencv2highgui.hpp>
#include <opencv2opencv.hpp>
#include "GOCVHelper.h"
#include <iostream>
using namespace std;
using namespace cv;
int main() {
Mat src = imread("e:/sandbox/测试图片.jpg", IMREAD_COLOR);
Mat gray;
Mat board(src.size(), src.type(), Scalar::all(0));
vector<VP> contours;
//灰度域变化
cvtColor(src, gray, COLOR_BGR2GRAY);
threshold(gray, gray, 100, 255, THRESH_OTSU);
bitwise_not(gray, gray);
GaussianBlur(gray, gray, Size(3, 3), 0, 0);
//寻找和绘制轮廓
VP bigestContour = FindBigestContour(gray);
contours.push_back(bigestContour);
//遍历轮廓,求出所有支撑角度
int icount = bigestContour.size();
float fmax = -1;//用于保存局部最大值
int imax = -1;
bool bstart = false;
for (int i = 0; i < bigestContour.size(); i++) {
Point2f pa = (Point2f)bigestContour[(i + icount - 7) % icount];
Point2f pb = (Point2f)bigestContour[(i + icount + 7) % icount];
Point2f pc = (Point2f)bigestContour[i];
//两支撑点距离
float fa = getDistance(pa, pb);
float fb = getDistance(pa, pc) + getDistance(pb, pc);
float fang = fa / fb;
float fsharp = 1 - fang;
if (fsharp > 0.05) {
bstart = true;
if (fsharp > fmax) {
fmax = fsharp;
imax = i;
}
}
else {
if (bstart) {
circle(board, bigestContour[imax], 10, Scalar(255), 1);
circle(src, bigestContour[imax], 10, Scalar(0, 0, 0), 1);
imax = -1;
fmax = -1;
bstart = false;
}
}
}
imshow("src", src);
waitKey(0);
}