变换矩阵是数学线性代数中的一个概念。
在线性代数中,线性变换能够用矩阵表示。如果T是一个把Rn映射到Rm的线性变换,且x是一个具有n个元素的列向量,那么

我们把m×n的矩阵A,称为T的变换矩阵。
在单位方块上应用各种二维仿射变换矩阵的效果。
最为常用的几何变换都是线性变换,这包括旋转、缩放、切变、反射以及正投影。在二维空间中,线性变换可以用2×2的变换矩阵表示。
旋转
绕原点逆时针旋转 θ 度角的变换公式是  与
与  ,用矩阵表示为:
,用矩阵表示为:

缩放
缩放(反矩阵)公式为  与
与  ,用矩阵表示为:
,用矩阵表示为:
切变
切变有两种可能的形式:
平行于 x 轴的切变为  与
与  ,矩阵表示为:
,矩阵表示为:
平行于 y 轴的切变为  与
与  ,矩阵表示为:
,矩阵表示为:
反射
为了沿经过原点的直线反射向量,假设(ux, uy)为直线方向的单位向量。变换矩阵为:

不经过原点的直线的反射是仿射变换,而不是线性变换。
若一座标(x, y)沿直线  进行反射,则其影像(x', y')可用以下公式求得:
进行反射,则其影像(x', y')可用以下公式求得:

正投影
为了将向量正投影到一条经过原点的直线,假设(ux, uy)是直线方向的单位向量,变换矩阵为:

跟反射一样,正投影到一条不经过原点的直线的变换是仿射变换,而不是线性变换。
平行投影也是线性变换,也可以用矩阵表示。但是透视投影不是线性变换,必须用齐次坐标表示。
仿射变换
为了表示仿射变换,需要使用齐次坐标,即用三维向量(x, y, 1)表示二维向量,对于高维来说也是如此。按照这种方法,就可以用矩阵乘法表示变换。 ;
;  变为
变为
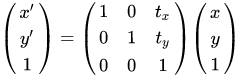
在矩阵中增加一列与一行,除右下角的元素为1外其它部分填充为0,通过这种方法,所有的线性变换都可以转换为仿射变换。例如,上面的旋转矩阵变为
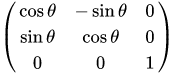
通过这种方法,使用与前面一样的矩阵乘积可以将各种变换无缝地集成到一起。
当使用仿射变换时,齐次坐标向量w从来不变,这样可以把它当作为1。但是,透视投影中并不是这样。
透视投影
三维计算机图形学中另外一种重要的变换是透视投影。与平行投影沿着平行线将物体投影到图像平面上不同,透视投影按照从投影中心这一点发出的直线将物体投影到图像平面。这就意味着距离投影中心越远投影越小,距离越近投影越大。
最简单的透视投影将投影中心作为坐标原点,z = 1作为图像平面,这样投影变换为 ;
;  ,用齐次坐标表示为:
,用齐次坐标表示为:
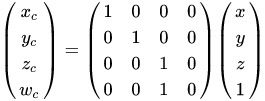
(这个乘法的计算结果是 =
=  。)
。)
在进行乘法计算之后,通常齐次元素wc并不为1,所以为了映射回真实平面需要进行齐次除法,即每个元素都除以wc:
更加复杂的透视投影可以是与旋转、缩放、平移、切变等组合在一起对图像进行变换。
