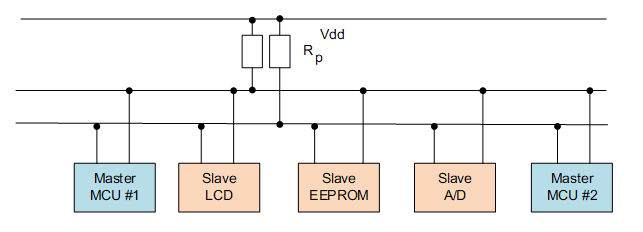
I2C主从结构(可以有多个主机,但同一时间只能有一个):I2C有两种地址结构7位/10位

总线空闲时,SDA 和 SCL 都处于高电平状态。
开始信号: SCL 为高电平时,主机将 SDA 拉低
结束信号: 在 SDA 为低电平时,主机将 SCL 拉高并保持高电平,然后在将 SDA 拉高,表示传输结束
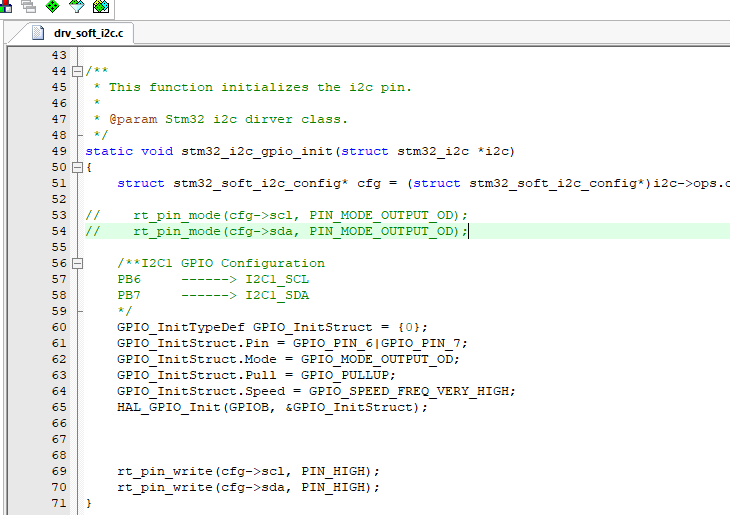
软件包:AT24CXX这个是IO模拟的I2C,可以同时模拟多个,但要注意的是:IO模拟时,管脚被配置成了OD输出不带上拉,此时必须有外部电阻上拉,否则是用不了的(可以用HAL接口函数代替);但若用硬件I2C,系统默认配置为复用推挽输出,可以设置内部上拉,还可以用。
API函数:
rt_device_t rt_device_find(const char* name);查找设备
读写信息
rt_size_t rt_i2c_transfer(struct rt_i2c_bus_device *bus,
struct rt_i2c_msg msgs[],
rt_uint32_t num); struct rt_i2c_msg
{
rt_uint16_t addr; /* 从机地址 */
rt_uint16_t flags; /* 读、写标志等 */
rt_uint16_t len; /* 读写数据字节数 */
rt_uint8_t *buf; /* 读写数据缓冲区指针 */
}
读写寄存器示例:
#include <rtthread.h>
#include <rtdevice.h>
#define AHT10_I2C_BUS_NAME "i2c1" /* 传感器连接的I2C总线设备名称 */
#define AHT10_ADDR 0x38 /* 从机地址 */
#define AHT10_CALIBRATION_CMD 0xE1 /* 校准命令 */
#define AHT10_NORMAL_CMD 0xA8 /* 一般命令 */
#define AHT10_GET_DATA 0xAC /* 获取数据命令 */
static struct rt_i2c_bus_device *i2c_bus = RT_NULL; /* I2C总线设备句柄 */
static rt_bool_t initialized = RT_FALSE; /* 传感器初始化状态 */
/* 写传感器寄存器 */
static rt_err_t write_reg(struct rt_i2c_bus_device *bus, rt_uint8_t reg, rt_uint8_t *data)
{
rt_uint8_t buf[3];
struct rt_i2c_msg msgs;
buf[0] = reg; //cmd
buf[1] = data[0];
buf[2] = data[1];
msgs.addr = AHT10_ADDR;
msgs.flags = RT_I2C_WR;
msgs.buf = buf;
msgs.len = 3;
/* 调用I2C设备接口传输数据 */
if (rt_i2c_transfer(bus, &msgs, 1) == 1)
{
return RT_EOK;
}
else
{
return -RT_ERROR;
}
}
/* 读传感器寄存器数据 */
static rt_err_t read_regs(struct rt_i2c_bus_device *bus, rt_uint8_t len, rt_uint8_t *buf)
{
struct rt_i2c_msg msgs;
msgs.addr = AHT10_ADDR;
msgs.flags = RT_I2C_RD;
msgs.buf = buf;
msgs.len = len;
/* 调用I2C设备接口传输数据 */
if (rt_i2c_transfer(bus, &msgs, 1) == 1)
{
return RT_EOK;
}
else
{
return -RT_ERROR;
}
}