虽然看了一些很好的blog了解了LSTM的内部机制,但对框架中的lstm输入输出和各个参数还是没有一个清晰的认识,今天打算彻底把理论和实现联系起来,再分析一下pytorch中的LSTM实现。
先说理论部分。一个非常有名的blog把原理讲得很清楚,推荐参考。总之就是这些公式:
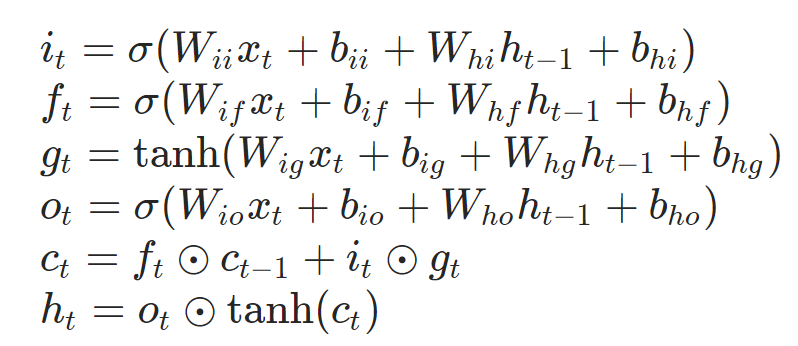
简单来说就是,LSTM一共有三个门,输入门,遗忘门,输出门, 分别为三个门的程度参数,
是对输入的常规RNN操作(GATE gate)。公式里可以看到LSTM的输出有两个,细胞状态
和隐状态
,
是经输入、遗忘门的产物,也就是当前cell本身的内容,经过输出门得到
,就是想输出什么内容给下一单元。
那么实际应用时,我们并不关心细胞本身的状态,而是要拿到它呈现出的状态作为最终输出。
以pytorch中的LSTM为例:
torch.nn.LSTM(*args, kwargs)**
官方API:
https://pytorch.org/docs/stable/nn.html?highlight=lstm#torch.nn.LSTM
- 参数
– input_size
– hidden_size
– num_layers
– bias
– batch_first
– dropout
– bidirectional - 输入
– input (seq_len, batch, input_size)
– h_0 (num_layers * num_directions, batch, hidden_size)
– c_0 (num_layers * num_directions, batch, hidden_size) - 输出
– output (seq_len, batch, num_directions * hidden_size)
– h_n (num_layers * num_directions, batch, hidden_size)
– c_n (num_layers * num_directions, batch, hidden_size)
用起来很简单,当作黑箱时只要设置参数让它输出我们想要的shape就行了,但这些参数好像很难和前面公式里的那些联系起来,不便于理解和灵活使用。
先看一张很好的图(LSTM神经网络输入输出究竟是怎样的? - Scofield的回答 - 知乎):
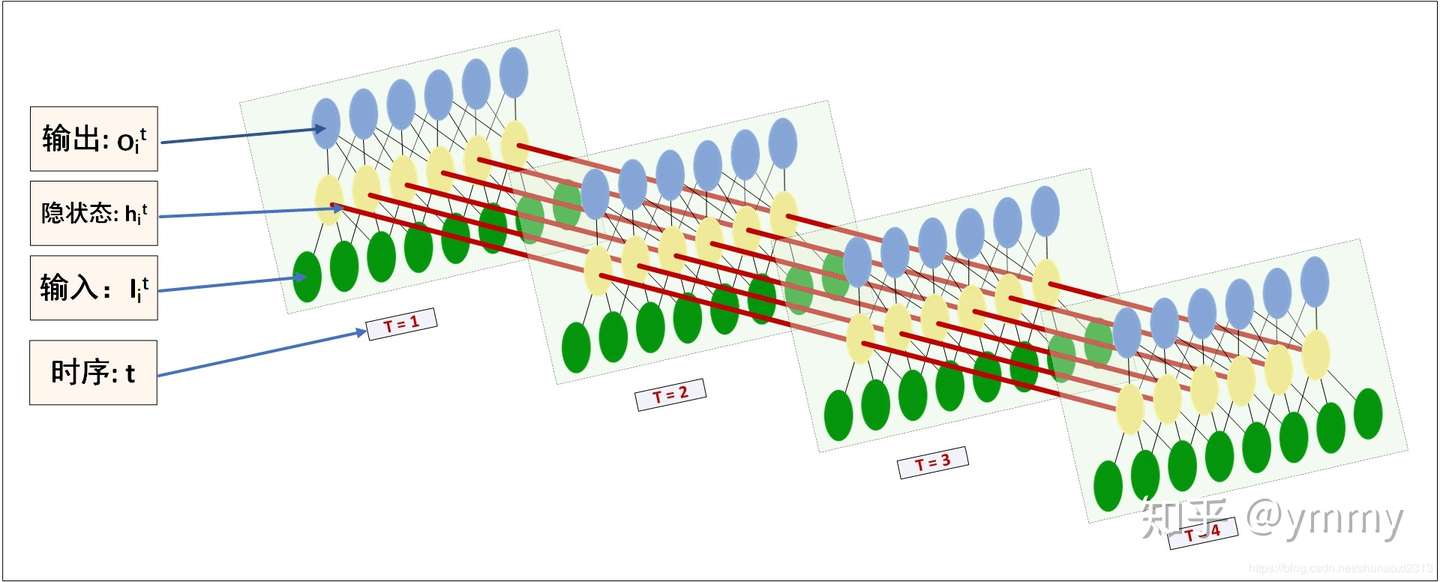
这张图是以MLP的形式展示LSTM的传播方式(不用管左边的符号,输出和隐状态其实是一样的),方便理解hidden_size这个参数。其实hidden_size在各个函数里含义都差不多,就是参数W的第一维(或最后一维)。那么对应前面的公式,hidden_size实际就是以这个size设置所有W的对应维度。
再看另一张很好的图(https://medium.com/mlreview/understanding-lstm-and-its-diagrams-37e2f46f1714):
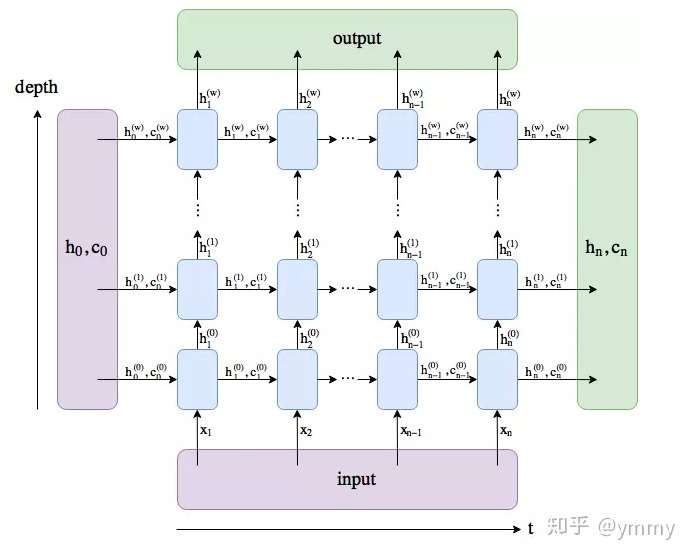
这张图非常便于理解参数num_layers。实际上就是个depth堆叠,每个蓝色块都是LSTM单元,只不过第一层输入是 ,中间层输入是
。
剩下的参数就比较好理解了,input_size即输入层的维度,例如embedding_dim。batch_first,第一维是否是batch,为什么要设置这个参数后面再说。bidirectional,是否为双向LSTM。
接下来看一下输入输出。关于input,API中提到也可以是一个packed变量序列,这个后面再讲。输入输出中h和c的shape (num_layers * num_directions, batch, hidden_size) 也是个容易困惑的点,但有了上面那张图就好说多了。绿色块 即长度为n的序列的最终输出,可以看出是所有depth输出的拼接,维度是num_layers。双向LSTM情况,相当于有两个图中的网络,只不过输入颠倒过来了,再将这两个最终隐状态拼接起来,维度num_layers*2。
最后看一下输出output。初学时看别人的代码,总是搞不清到底是取output还是用 ,怎么用的都有。其实从图中可以看到,output就是最后一个layer上,序列中每个时刻(横向)状态h的集合(若为双向则按位置拼接,输出维度2*hidden_size),而
实际上是每个layer最后一个状态(纵向)输出的拼接。
output of shape (seq_len, batch, num_directions * hidden_size): tensor containing the output features (h_t) from the last layer of the LSTM, for each t.
h_n of shape (num_layers * num_directions, batch, hidden_size): tensor containing the hidden state for t = seq_len.
c_n of shape (num_layers * num_directions, batch, hidden_size): tensor containing the cell state for t = seq_len.
也就是说,对于单向LSTM来说,就是
,相当于序列最后一个时间步的输出。如果使用LSTM的目的是得到整个序列的embedding,与序列长度无关,由于LSTM具有序列信息传递性,因此一般可以取
当作序列embedding。但双向LSTM推广后,每个时间步的隐层输出都可以作为当前词的一个融合了上下文的embedding,因此BiLSTM可以视为一种词级别的encoder方法,得到的output既可以用于词级别的输出拼接,也可以进行融合(比如attention加权求和、pooling)得到序列级的输出。
理论终于和实践联系起来了,下面来具体分析一下pytorch的LSTM实现。
pytorch的LSTM
1、torch.nn.LSTMCell(input_size, hidden_size, bias=True)
官方API:https://pytorch.org/docs/stable/nn.html?highlight=lstm#torch.nn.LSTMCell**
一个LSTM单元,相当于一个time step的处理。
2、torch.nn.LSTM(*args, kwargs)**
官方API:https://pytorch.org/docs/stable/nn.html?highlight=lstm#torch.nn.LSTM
前面基本讲得差不多了,只剩下两处:参数batch_first和input的packed variable length sequence。
batch_first
为什么要有batch_first这个参数呢?常规的输入不就是(batch, seq_len, input_size)吗?而且参数默认为False,也就是它鼓励你第一维不是batch,更奇怪了。
取pytorch官方的一个tutorial(chatbot tutorial)中的一个图:

图中batch size = 6, max_seq_length = 4。左:[Batch_size, Seq_len, 1] 右:[Seq_len, Batch_size, 1]
左边是我们的常规输入(先不考虑hidden dim,每个数字代表序列中的一个词),右边是转置后,第一维成了max_length。我们知道在操作时第一维一般可视为“循环”维度,因此左边一个循环项是一个完整的时间序列样本,无法同时经LSTM处理(跨时间,而LSTM是逐时间步运行的),而右边跨batch_samples的循环项相当于当前time step下所有序列的当前词,可以并行过LSTM。(当然不管你是否batch_first它都是这么处理的,这个参数应该只是提醒一下这个trick)。
pack&pad
torch.nn.utils.rnn.pack_sequence(sequences, enforce_sorted=True)
官方API:https://pytorch.org/docs/stable/nn.html?highlight=lstm#torch.nn.utils.rnn.pack_sequence
这是pack操作,输入的sequences是tensor组成的list,要求按长度从大到小排序。官网的例子:

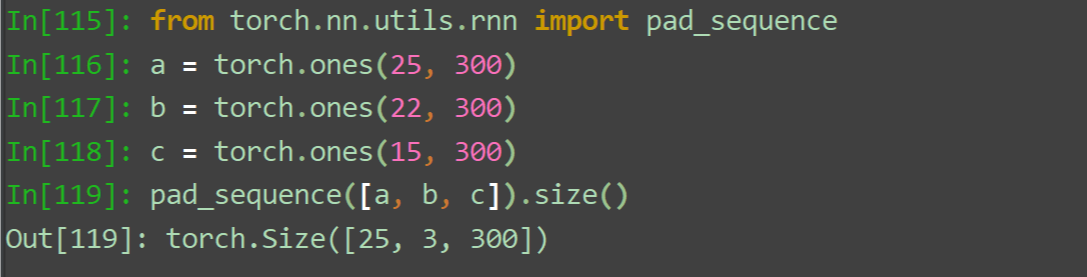
torch.nn.utils.rnn.pad_sequence(sequences, batch_first=False, padding_value=0)
官方API:https://pytorch.org/docs/stable/nn.html?highlight=lstm#torch.nn.utils.rnn.pad_sequence
这是pad操作,sequences也是list。这个比较好理解,就是给list里的tensor都用padding_value来pad成最长的长度,并组合成一个tensor:
看了这两个操作,隐隐约约和前面的LSTM联系起来了。我们知道一个batch里的序列不一定等长,需要pad操作用0把它们都填充成max_length长度。但前面说了LSTM的一次forward对应一个time step,接收的是across batch samples的输入,这就导致短序列可能在当前time step上已经结束,而你还是在给它输入东西(pad),这就会对结果产生影响(可以对照公式看看,即便输入全0还是会有影响)。我们想要的效果是,LSTM知道batch中每个序列的长度,等到某个序列输入结束后下面的time step就不带它了。
传统的pad不能用,LSTM需要一种其它的方法来处理变长输入。这时我们观察刚看到的pack操作,感觉终于明白了它的道理。
回顾这张图
官方的例子有点混淆,我写了一个更直观的:

把这个例子看成是LSTM处理一个batch的过程,注意看成转置的形式,即batch_first=False,也就是[4,1,9]是第一个序列,[5,2]是第二个序列…max_length=3,batch_size=5个样本。从pack_sequence的输出可以看出其实是一个很简单的过程,有点像稀疏矩阵的存储方法,先都塞到一起再记录位置(这里是长度)。先把所有样本序列塞到一个张量里,然后记录每个样本序列的长度。
这两个函数都是基本操作,一般不会直接使用。常用的是下面这两个:
torch.nn.utils.rnn.pack_padded_sequence(input, lengths, batch_first=False, enforce_sorted=True)
官方API:https://pytorch.org/docs/stable/nn.html?highlight=lstm#torch.nn.utils.rnn.pack_padded_sequence
顾名思义,pack一个经过pad的sequence,因为我们一般在处理数据时就已经将序列pad成等长了。lengths即为序列的长度。
torch.nn.utils.rnn.pad_packed_sequence(sequence, batch_first=False, padding_value=0.0, total_length=None)
官方API:https://pytorch.org/docs/stable/nn.html?highlight=lstm#torch.nn.utils.rnn.pad_packed_sequence
这是上面函数的逆操作,再pad回去供后续使用。这里的total_length是个很实用的参数,在下面的例子中可以看到。
a = torch.tensor([[1., 2., 3., 4, 1], [1, 2, 3, 0, 0]]) b = torch.nn.utils.rnn.pack_padded_sequence(a, torch.tensor([2, 2, 2, 1, 1])) b >>> PackedSequence(data=tensor([1., 2., 3., 4., 1., 1., 2., 3.]), batch_sizes=tensor([5, 3]), sorted_indices=None, unsorted_indices=None) c = torch.nn.utils.rnn.pad_packed_sequence(b) c >>> (tensor([[1., 2., 3., 4., 1.], [1., 2., 3., 0., 0.]]), tensor([2, 2, 2, 1, 1]))
一个完整的例子:
1 import torch as t 2 from torch.nn.utils.rnn import pack_padded_sequence, pad_packed_sequence 3 4 a = t.tensor([[1,2,3],[6,0,0],[4,5,0]]) #(batch_size, max_length) 5 lengths = t.tensor([3,1,2]) 6 7 # 排序 8 a_lengths, idx = lengths.sort(0, descending=True) 9 _, un_idx = t.sort(idx, dim=0) 10 a = a[idx] 11 12 # 定义层 13 emb = t.nn.Embedding(20,2,padding_idx=0) 14 lstm = t.nn.LSTM(input_size=2, hidden_size=4, batch_first=True) 15 16 a_input = emb(a) 17 a_packed_input = t.nn.utils.rnn.pack_padded_sequence(input=a_input, lengths=a_lengths, batch_first=True) 18 packed_out, _ = lstm(a_packed_input) 19 out, _ = pad_packed_sequence(packed_out, batch_first=True) 20 # 根据un_idx将输出转回原输入顺序 21 out = t.index_select(out, 0, un_idx)
上面便是常用的使用方法(个人认为完全可以封装到LSTM函数里,不知道为什么要这么设计)。但此时假设另一个batch,b:
1 # b是另一个batch 2 b = t.tensor([[7,8,0],[9,0,0],[10,0,0]])
batch中的最大长度为2,而对于整个数据流来说max_length=3,这就导致b经LSTM后pad的结果与整体的长度不匹配,此时设置pad_packed_sequence的total_length=3即可。