声明:本文为原创文章,发表于nebulaf91的csdn博客。欢迎转载,但请务必保留本信息,注明文章出处。
本文作者: nebulaf91
本文原始地址:http://blog.csdn.net/u011508640/article/details/72815981
频率学派与贝叶斯派
在说极大似然估计(Maximum Likelihood Estimate)与最大后验概率估计(Maximum A Posteriori estimation)之前,不得不说对于概率看法不同的两大派别频率学派与贝叶斯派。他们看待世界的视角不同,导致他们对于产生数据的模型参数的理解也不同。
① 频率学派
他们认为世界是确定的。他们直接为事件本身建模,也就是说事件在多次重复实验中趋于一个稳定的值p,那么这个值就是该事件的概率。
他们认为模型参数是个定值,希望通过类似解方程组的方式从数据中求得该未知数。这就是频率学派使用的参数估计方法-极大似然估计(MLE),这种方法往往在大数据量的情况下可以很好的还原模型的真实情况。
② 贝叶斯派
他们认为世界是不确定的,因获取的信息不同而异。假设对世界先有一个预先的估计,然后通过获取的信息来不断调整之前的预估计。 他们不试图对事件本身进行建模,而是从旁观者的角度来说。因此对于同一个事件,不同的人掌握的先验不同的话,那么他们所认为的事件状态也会不同。
他们认为模型参数源自某种潜在分布,希望从数据中推知该分布。对于数据的观测方式不同或者假设不同,那么推知的该参数也会因此而存在差异。这就是贝叶斯派视角下用来估计参数的常用方法-最大后验概率估计(MAP),这种方法在先验假设比较靠谱的情况下效果显著,随着数据量的增加,先验假设对于模型参数的主导作用会逐渐削弱,相反真实的数据样例会大大占据有利地位。极端情况下,比如把先验假设去掉,或者假设先验满足均匀分布的话,那她和极大似然估计就如出一辙了。
最大似然估计(MLE)和最大后验概率估计(MAP)
最大似然估计(Maximum likelihood estimation, 简称MLE)和最大后验概率估计(Maximum a posteriori estimation, 简称MAP)是很常用的两种参数估计方法,如果不理解这两种方法的思路,很容易弄混它们。下文将详细说明MLE和MAP的思路与区别。
但别急,我们先从概率和统计的区别讲起。
概率和统计是一个东西吗?
概率(probabilty)和统计(statistics)看似两个相近的概念,其实研究的问题刚好相反。
概率研究的问题是,已知一个模型和参数,怎么去预测这个模型产生的结果的特性(例如均值,方差,协方差等等)。 举个例子,我想研究怎么养猪(模型是猪),我选好了想养的品种、喂养方式、猪棚的设计等等(选择参数),我想知道我养出来的猪大概能有多肥,肉质怎么样(预测结果)。
统计研究的问题则相反。统计是,有一堆数据,要利用这堆数据去预测模型和参数。仍以猪为例。现在我买到了一堆肉,通过观察和判断,我确定这是猪肉(这就确定了模型。在实际研究中,也是通过观察数据推测模型是/像高斯分布的、指数分布的、拉普拉斯分布的等等),然后,可以进一步研究,判定这猪的品种、这是圈养猪还是跑山猪还是网易猪,等等(推测模型参数)。
一句话总结:概率是已知模型和参数,推数据。统计是已知数据,推模型和参数。
显然,本文解释的MLE和MAP都是统计领域的问题。它们都是用来推测参数的方法。为什么会存在着两种不同方法呢? 这需要理解贝叶斯思想。我们来看看贝叶斯公式。
贝叶斯公式到底在说什么?
学习机器学习和模式识别的人一定都听过贝叶斯公式(Bayes’ Theorem):
P(A|B)=P(B|A)P(A) / P(B)【式1】
贝叶斯公式看起来很简单,无非是倒了倒条件概率和联合概率的公式。
把B展开,可以写成:
P(A|B)=P(B|A)P(A) / (P(B|A)P(A)+P(B|∼A)P(∼A))【式2】(∼A表示”非A”)
这个式子就很有意思了。
想想这个情况。一辆汽车(或者电瓶车)的警报响了,你通常是什么反应?有小偷?撞车了? 不。。 你通常什么反应都没有。因为汽车警报响一响实在是太正常了!每天都要发生好多次。本来,汽车警报设置的功能是,出现了异常情况,需要人关注。然而,由于虚警实在是太多,人们渐渐不相信警报的功能了。
贝叶斯公式就是在描述,你有多大把握能相信一件证据?(how much you can trust the evidence)
我们假设响警报的目的就是想说汽车被砸了。把A计作“汽车被砸了”,B计作“警报响了”,带进贝叶斯公式里看。我们想求等式左边发生A|B的概率,这是在说警报响了,汽车也确实被砸了。汽车被砸引起(trigger)警报响,即B|A。但是,也有可能是汽车被小孩子皮球踢了一下、被行人碰了一下等其他原因(统统计作∼A),其他原因引起汽车警报响了,即B|∼A。那么,现在突然听见警报响了,这时汽车已经被砸了的概率是多少呢(这即是说,警报响这个证据有了,多大把握能相信它确实是在报警说汽车被砸了)?想一想,应当这样来计算。用警报响起、汽车也被砸了这事件的数量,除以响警报事件的数量(这即【式1】)。进一步展开,即警报响起、汽车也被砸了的事件的数量,除以警报响起、汽车被砸了的事件数量加上警报响起、汽车没被砸的事件数量(这即【式2】)。
可能有点绕,请稍稍想一想。
再思考【式2】。想让P(A|B)=1,即警报响了,汽车一定被砸了,该怎么做呢?让P(B|∼A)P(∼A)=0即可。很容易想清楚,假若让P(∼A)=0,即杜绝了汽车被球踢、被行人碰到等等其他所有情况,那自然,警报响了,只剩下一种可能——汽车被砸了。这即是提高了响警报这个证据的说服力。
从这个角度总结贝叶斯公式:做判断的时候,要考虑所有的因素。 老板骂你,不一定是你把什么工作搞砸了,可能只是他今天出门前和太太吵了一架。
再思考【式2】。观察【式2】右边的分子,P(B|A)为汽车被砸后响警报的概率。姑且仍为这是1吧。但是,若P(A)很小,即汽车被砸的概率本身就很小,则P(B|A)P(A))仍然很小,即【式2】右边分子仍然很小,P(A|B)还是大不起来。 这里,P(A)即是常说的先验概率,如果A的先验概率很小,就算P(B|A)较大,可能A的后验概率P(A|B)还是不会大(假设P(B|∼A)P(∼A)不变的情况下)。
从这个角度思考贝叶斯公式:一个本来就难以发生的事情,就算出现某个证据和他强烈相关,也要谨慎。证据很可能来自别的虽然不是很相关,但发生概率较高的事情。 发现刚才写的代码编译报错,可是我今天状态特别好,这语言我也很熟悉,犯错的概率很低。因此觉得是编译器出错了。 ————别,还是先再检查下自己的代码吧。
好了好了,说了这么多,下面言归正传,说一说MLE。
——————不行,还得先说似然函数(likelihood function)
似然函数
似然(likelihood)这个词其实和概率(probability)是差不多的意思,Colins字典这么解释:The likelihood of something happening is how likely it is to happen. 你把likelihood换成probability,这解释也读得通。但是在统计里面,似然函数和概率函数却是两个不同的概念(其实也很相近就是了)。
对于这个函数:P(x|θ)
输入有两个:x表示某一个具体的数据;θ表示模型的参数。
如果θ是已知确定的,x是变量,这个函数叫做概率函数(probability function),它描述对于不同的样本点x,其出现概率是多少。
如果x是已知确定的,θ是变量,这个函数叫做似然函数(likelihood function), 它描述对于不同的模型参数,出现x这个样本点的概率是多少。
这有点像“一菜两吃”的意思。其实这样的形式我们以前也不是没遇到过。例如,f(x,y)=x^y, 即x的y次方。如果x是已知确定的(例如x=2),这就是f(y)=2^y, 这是指数函数。 如果y是已知确定的(例如y=2),这就是f(x)=x^2,这是二次函数。同一个数学形式,从不同的变量角度观察,可以有不同的名字。
这么说应该清楚了吧? 如果还没讲清楚,别急,下文会有具体例子。
现在真要先讲讲MLE了。。
最大似然估计(MLE)
假设有一个造币厂生产某种硬币,现在我们拿到了一枚这种硬币,想试试这硬币是不是均匀的。即想知道抛这枚硬币,正反面出现的概率(记为θ)各是多少?
这是一个统计问题,回想一下,解决统计问题需要什么? 数据!
于是我们拿这枚硬币抛了10次,得到的数据(x0)是:反正正正正反正正正反。我们想求的正面概率θ是模型参数,而抛硬币模型我们可以假设是 二项分布。
那么,出现实验结果x0(即反正正正正反正正正反)的似然函数是多少呢?
f(x0,θ)=(1−θ)×θ×θ×θ×θ×(1−θ)×θ×θ×θ×(1−θ)=θ^7(1−θ)^3=f(θ)
注意,这是个只关于θ的函数。而最大似然估计,顾名思义,就是要最大化这个函数。我们可以画出f(θ)的图像:

可以看出,在θ=0.7时,似然函数取得最大值。
这样,我们已经完成了对θ的最大似然估计。即,抛10次硬币,发现7次硬币正面向上,最大似然估计认为正面向上的概率是0.7。(ummm..这非常直观合理,对吧?)
且慢,一些人可能会说,硬币一般都是均匀的啊! 就算你做实验发现结果是“反正正正正反正正正反”,我也不信θ=0.7。
这里就包含了贝叶斯学派的思想了——要考虑先验概率。 为此,引入了最大后验概率估计。
最大后验概率估计
最大似然估计是求参数θ, 使似然函数P(x0|θ)最大。最大后验概率估计则是想求θ使P(x0|θ)P(θ)最大。求得的θ不单单让似然函数大,θ自己出现的先验概率也得大。 (这有点像正则化里加惩罚项的思想,不过正则化里是利用加法,而MAP里是利用乘法)
MAP其实是在最大化P(θ|x0)=P(x0|θ)P(θ) / P(x0),不过因为x0是确定的(即投出的“反正正正正反正正正反”),P(x0)是一个已知值,所以去掉了分母P(x0)(假设“投10次硬币”是一次实验,实验做了1000次,“反正正正正反正正正反”出现了n次,则P(x0)=n/1000。总之,这是一个可以由数据集得到的值)。最大化P(θ|x0)的意义也很明确,x0已经出现了,要求θ取什么值使P(θ|x0)最大。顺带一提,P(θ|x0)即后验概率,这就是“最大后验概率估计”名字的由来。
根据贝叶斯理论:
这就是参数关于已有数据集合
的后验概率,要使得这个后验概率最大,和极大似然估计一样,这里需要对后验概率函数求导。由于分母中的
相对于
是独立的,所以可以直接忽略掉
。
为了得到参数,和MLE一样,需要对
求梯度,并使其等于0:
注意:
这里一定要注意,在MLE中,参数是一个定值,只是这个值未知,最大似然函数是
的函数,这里
是没有概率意义的。但是,在MAP中,
是有概率意义的,
有自己的分布,而这个分布函数,需要通过已有的样本集合
得到,即最大后验估计需要计算的是
。虽然从公式上来看
,但是这两种算法有本质的区别,MLE将
视为一个确定未知的值,而MAP则将
视为一个随机变量。
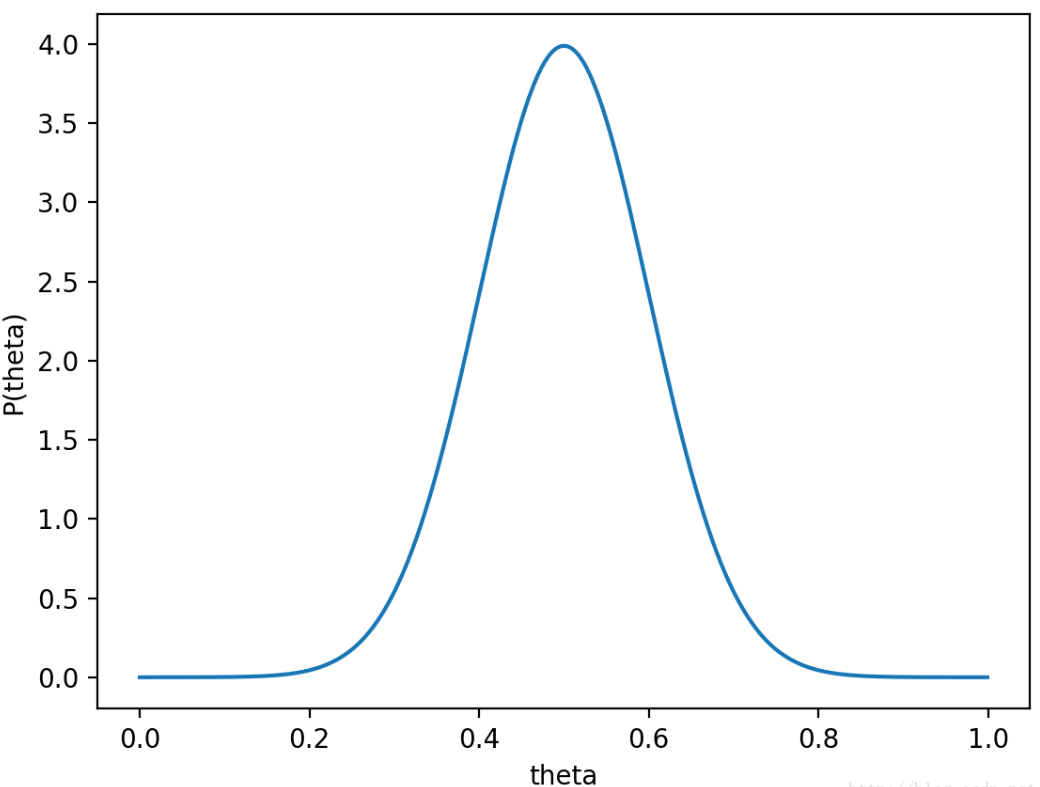
对于投硬币的例子来看,我们认为(”先验地知道“)θ取0.5的概率很大,取其他值的概率小一些。我们用一个高斯分布来具体描述我们掌握的这个先验知识,例如假设P(θ)为均值0.5,方差0.1的高斯函数,如下图:
则P(x0|θ)P(θ)的函数图像为:

注意,此时函数取最大值时,θ取值已向左偏移,不再是0.7。实际上,在θ=0.558时函数取得了最大值。即,用最大后验概率估计,得到θ=0.558。
最后,那要怎样才能说服一个贝叶斯派相信θ=0.7呢?你得多做点实验。。
如果做了1000次实验,其中700次都是正面向上,这时似然函数为:

如果仍然假设P(θ)为均值0.5,方差0.1的高斯函数,P(x0|θ)P(θ)的函数图像为:

在θ=0.696处,P(x0|θ)P(θ))取得最大值。
这样,就算一个考虑了先验概率的贝叶斯派,也不得不承认得把θ估计在0.7附近了。
PS. 要是遇上了顽固的贝叶斯派,认为P(θ=0.5)=1,那就没得玩了。。 无论怎么做实验,使用MAP估计出来都是θ=0.5。这也说明,一个合理的先验概率假设是很重要的。(通常,先验概率能从数据中直接分析得到)
最大似然估计和最大后验概率估计的区别
相信读完上文,MLE和MAP的区别应该是很清楚的了。MAP就是多个作为因子的先验概率P(θ)。或者,也可以反过来,认为MLE是把先验概率P(θ)认为等于1,即认为θ是均匀分布。
在MAP中,称为
的先验,假设其服从均匀分布,即对于所有
取值,
都是同一个常量,则MAP和MLE会得到相同的结果。当然了,如果
的方差非常的小,也就是说,
是近似均匀分布的话,MAP和ML的结果自然也会非常的相似。
MLE与MAP的联系


参考:
链接:https://www.jianshu.com/p/f9d56aeab75e
链接:https://blog.csdn.net/u011508640/article/details/72815981
链接:https://blog.csdn.net/qq_32742009/article/details/81477611