1.官网下载安装包,本次版本zookeeper-3.4.9.tar.gz

2.上传zookeeper安装包 到/opt目录下并解压
rz zookeeper-3.4.10.tar.gz
tar -zxvf zookeeper-3.4.10.tar.gz
3.新建专属zookeeper目录,mkdir /myzookeeper,
随后将上一步解压的zookeeper内容拷贝进/myzookeeper目录内

进入conf文件夹,拷贝zoo_sample.cfg改为zoo.cfg
zoo.cfg解读
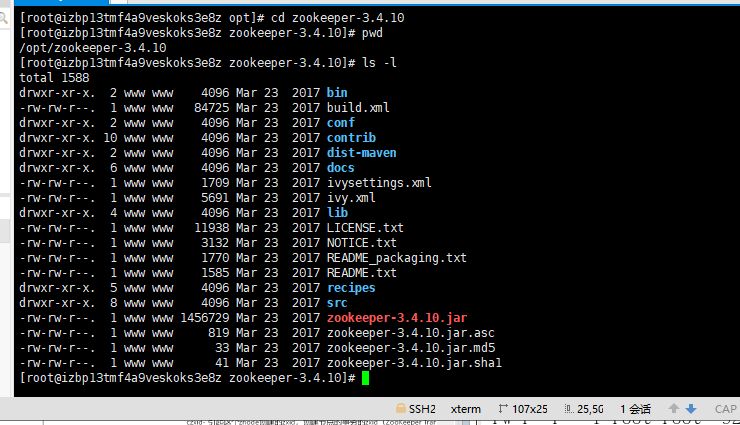
pwd 查看当前路径
ls -l 查看文件夹里面的文件
复制zook_sample.cfg 改名为zoo.cfg

编辑zoo.cfg
显示 set nu
取消显示 set nonu

tickTime:通信心跳数,Zookeeper服务器心跳时间,单位毫秒
Zookeeper使用的基本时间, 服务器之间或客户端与服务器之间维持心跳的时间间隔,也就是每个 tickTime 时间就会发送一个心跳,时间单位为毫秒。
它用于心跳机制,并且设置最小的session超时时间为两倍心跳时间.(session的最小超时时间是2*tickTime。)
initLimit:这个配置项是用来配置Zookeeper接收Follower客户端(这里所说的客户端不是用户链接Zookeeper服务器的客户端,而是Zookeeper服务器集群中连接到leader的Follower服务器,Follower在启动过程中,会从Leader同步所有最新数据,然后确定自己能够对外服务的起始状态。Leader允许F在 initLimit 时间内完成这个工作)初始化连接是最长能忍受多少个心跳的时间间隔数。
当已经超过10个心跳的时间(也就是tickTime)长度后Zookeeper服务器还没有收到客户端返回的信息,那么表明这个客户端连接失败。总的时间长度就是10*2000=20秒
syncLimit:LF同步通信时限 集群中Leader与Follower之间的最大响应时间单位。
在运行过程中,Leader负责与ZK集群中所有机器进行通信,例如通过一些心跳检测机制,来检测机器的存活状态,
假如响应超过syncLimit * tickTime(假设syncLimit=5 ,请求和应答时间长度,最长不能超过多少个tickTime的时间长度,总的时间长度就是5*2000=10秒。),Leader认为Follwer死掉,从服务器列表中删除Follwer。
# 在运行过程中,Leader负责与ZK集群中所有机器进行通信,例如通过一些心跳检测机制,来检测机器的存活状态。
如果L发出心跳包在syncLimit之后,还没有从F那收到响应,那么就认为这个F已经不在线了。
dataDir:数据文件目录+数据持久化路径
保存内存数据库快照信息的位置,如果没有其他说明,更新的事务日志也保存到数据库。
clientPort:客户端连接端口
监听客户端连接的端口。
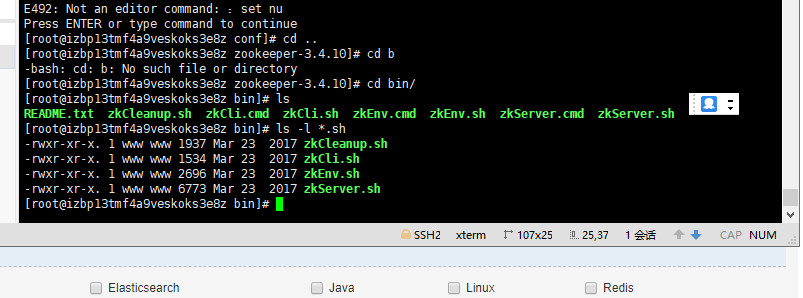
开启客户端服务+客户端连接
ls -l *.sh
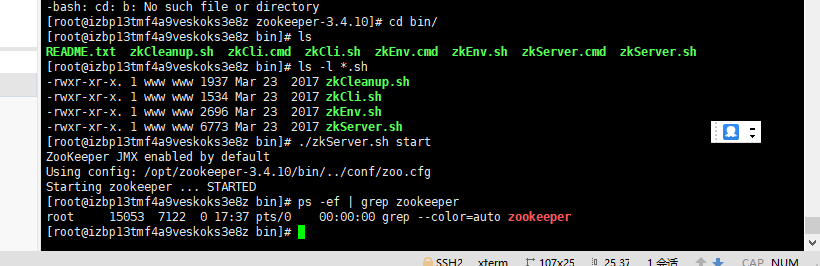
启动zookeeper

查看zookeeper进程
ps -ef | grep zookeeper
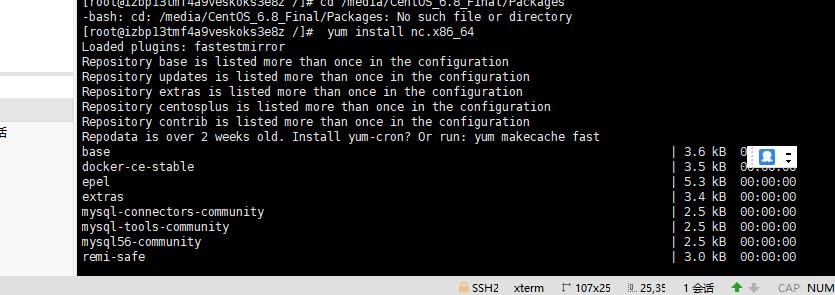
rock命令
yum install nc.x86_64
yum install nmap-ncat.x86_64
在Zookeeper服务器成功启动的前提下,在Linux侧的shell命令端口执行下面的ruok四字命令,
如果能够显示imok
表示zk服务器端成功启动。
客户端连接
连接:./zkCli.sh
退出:quit
一、zk服务命令
1. 启动ZK服务: bin/zkServer.sh start
2. 查看ZK服务状态: bin/zkServer.sh status
3. 停止ZK服务: bin/zkServer.sh stop
4. 重启ZK服务: bin/zkServer.sh restart
5. 连接服务器: zkCli.sh -server 127.0.0.1:2181
执行命令查看zookeeper状态:
./zkServer.sh status