欢迎关注个人公众号摸鱼范式

网络课程《数字集成电路静态时序分析基础》的笔记
建立时间和保持时间检查
建立时间检查
最常见的路径:CK-D。
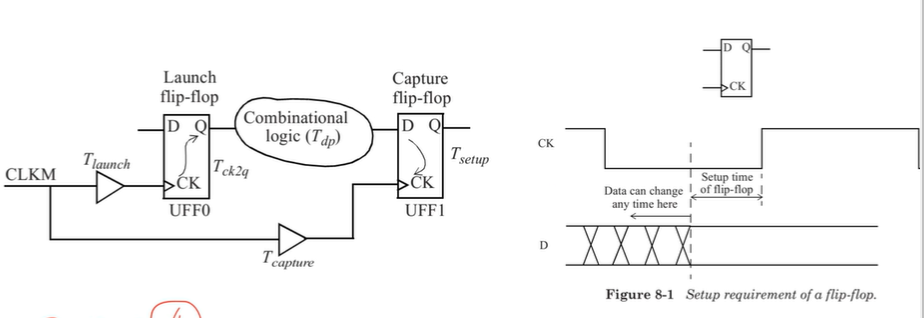
区分launch clk和capture clk
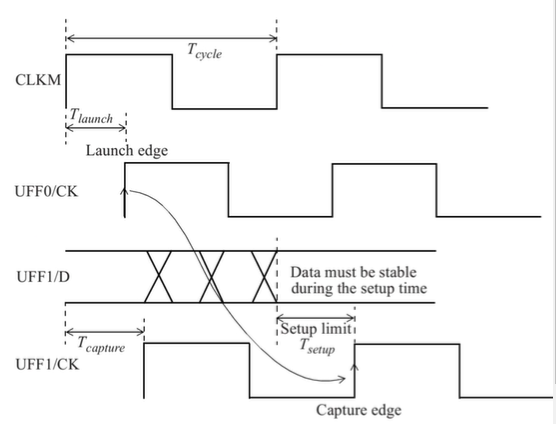
建立时间检查表达式:
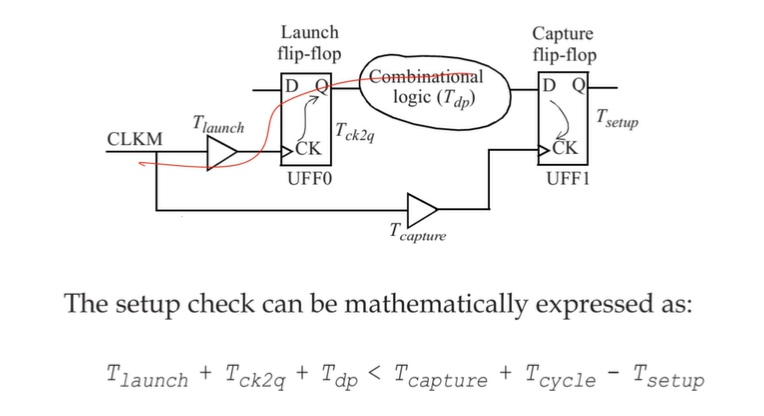
ck to d
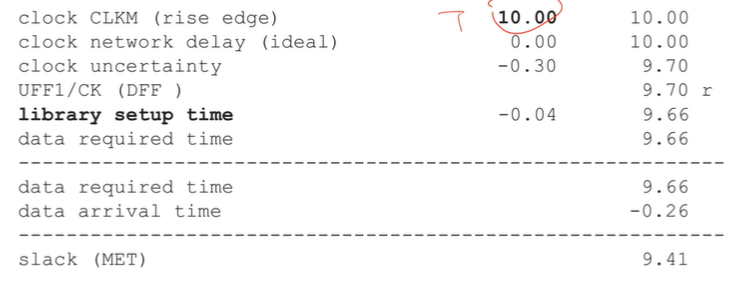
下面是一个timing report,起点是UFF0,终点是UFF1,path group是按照终点时钟分类的,所以是CLKM。path type max代表检查最大的路径延迟,point表示途径点,incr代表经过这个点的增量,path代表累计延迟。r和f代表rise和fall。
data arrival time代表总延迟,这是一个launch path的报告。

下面的是一个capture path的报告,首先经过时钟周期,时钟网络理想,建立时间0.04,时钟误差0.3,uncertainty为了让建立时间检查更加严苛。最终得到一个data required time,数据要求到达时间,必须要此之前,要求slack>=0,才算是时序满足要求。
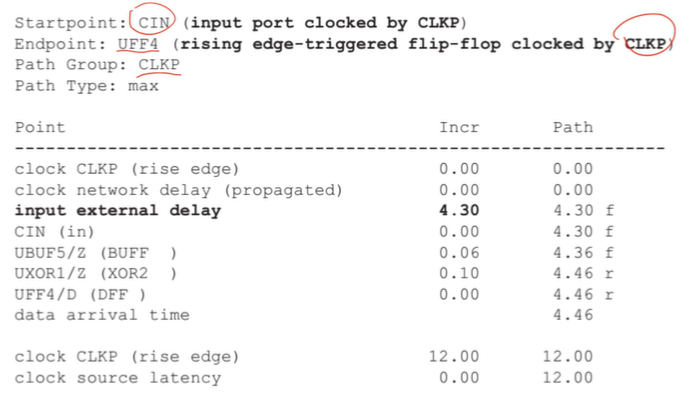
input port to flip-flop

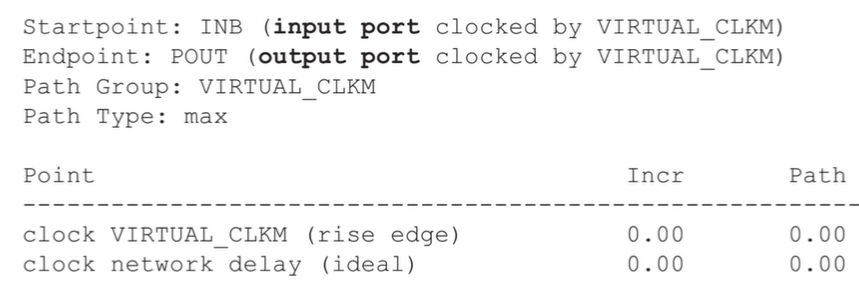
时序检查之前,由于外部没有时钟设定,要先设定虚拟时钟
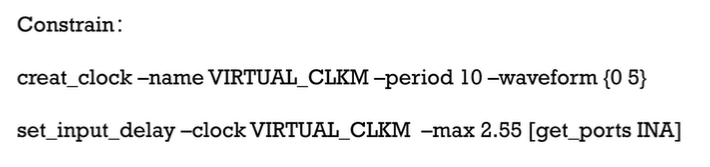
时序报告如下

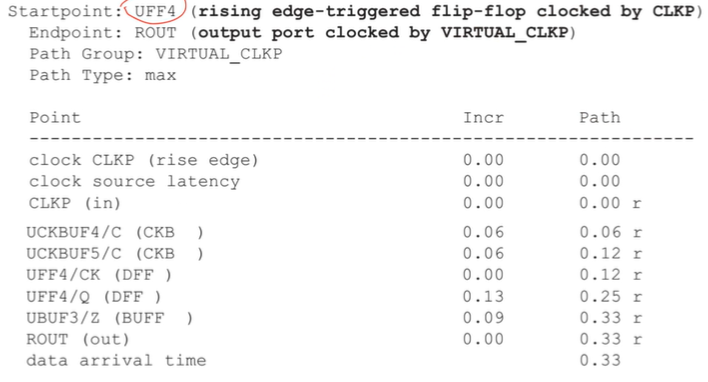
flipflop to output

要额外设定load约束

同样设定了虚拟时钟

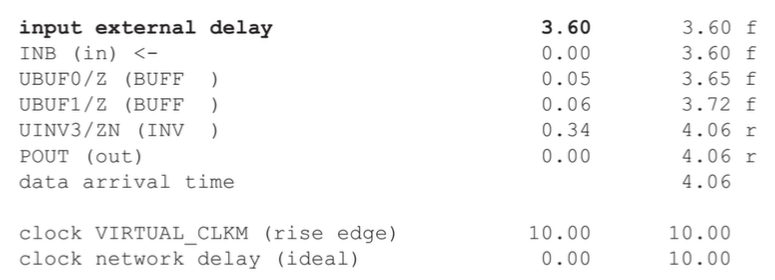
时序报告,注意path group是虚拟时钟,按照终点时钟分类。
launch path,output delay不在这里
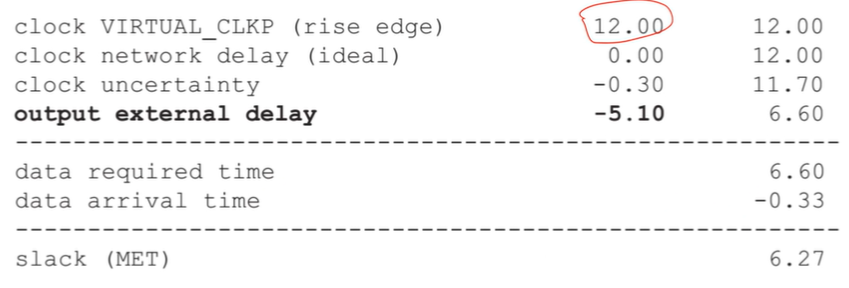
captured path,output delay在这里,这里的5.1包含了setup time,所以要放在captured path这里。
input to output

时序报告:

这样时序不满足,需要修改
保持时间检查
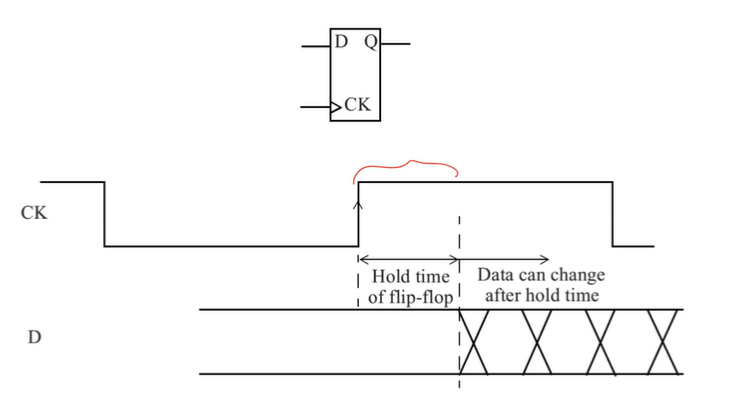
与建立时间一致,通过launch path和captured path进行检查

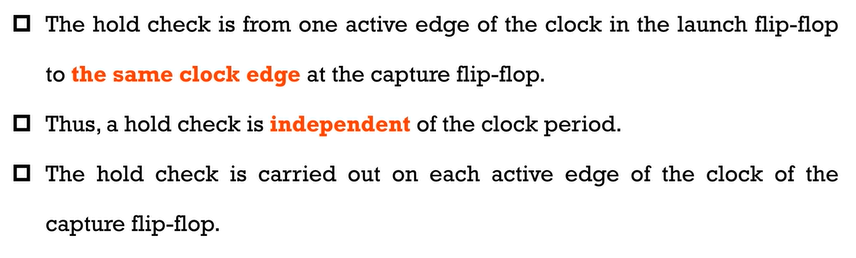
但是存在一些区别,保持时间是在launch flip-flop和captured flip-flop的同一个时钟边沿进行检查,因此保持时间检查与时钟周期无关。
路径分析

保持时间检查

reg to reg
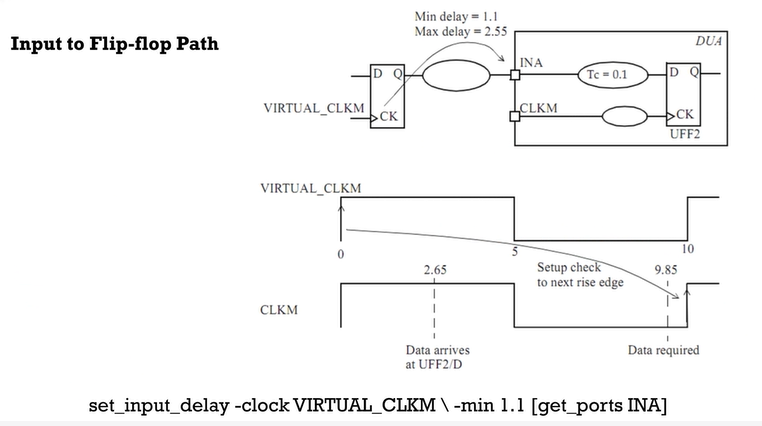
保持时间检查要使用min delay进行检查
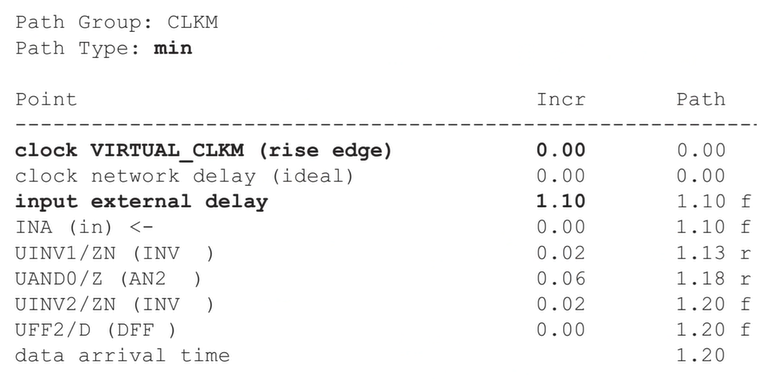
一个保持时间检查报告,launch path

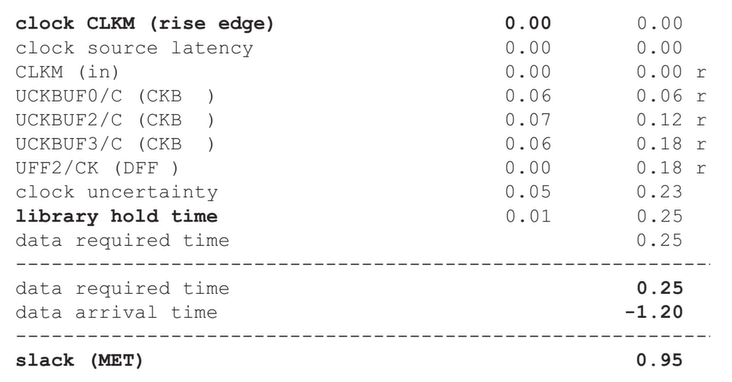
capture path

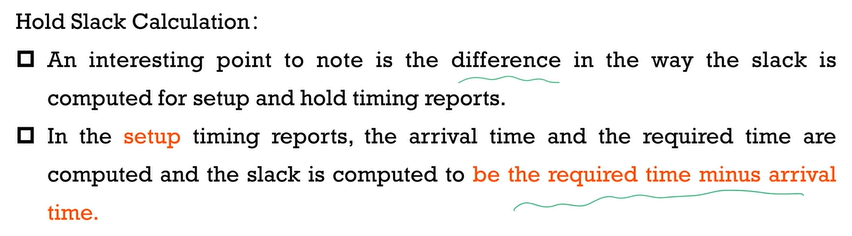
要求required time<arrival time
与setup time的区别
input to reg
时序报告
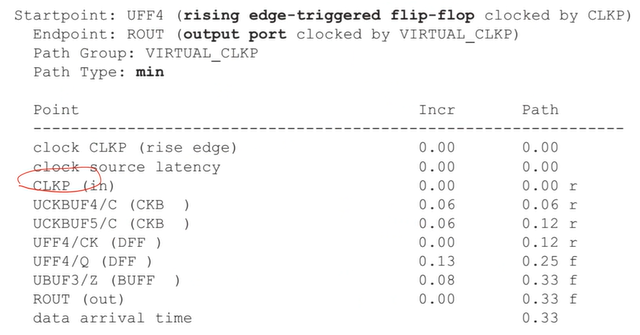
reg to output
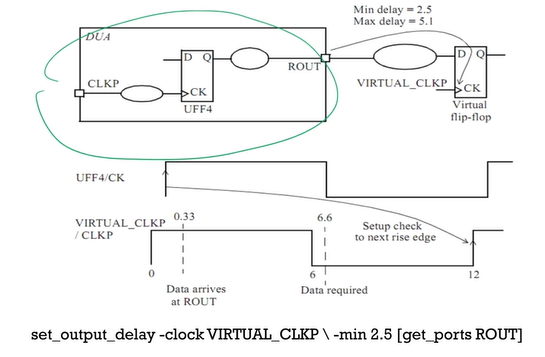
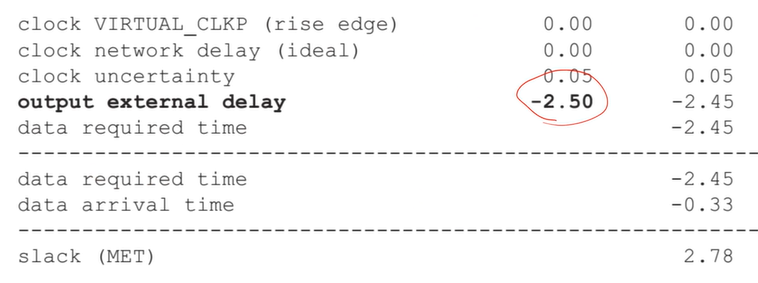
时序报告
依然没有hold time,全部算在output delay里
input to output

外加约束
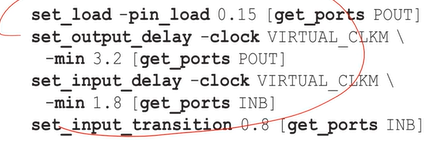
时序报告


总结
建立时间检查
保持时间检查