边缘检测的原理:
检测出图像中所有灰度值变化较大的点,而且这些点连起来构成若干线条,这些线条就称之为图像的边缘。
1986年,由John F. Canny 提出!
// Canny(Mat image, Mat edges, double threshold1, double threshold2, int
// apertureSize, boolean L2gradient)
// 第一个参数,InputArray类型的image,输入图像,即源图像,填Mat类的对象即可,且需为单通道8位图像。
// 第二个参数,OutputArray类型的edges,输出的边缘图,需要和源图片有一样的尺寸和类型。
// 第三个参数,double类型的threshold1,第一个滞后性阈值。
// 第四个参数,double类型的threshold2,第二个滞后性阈值。
// 第五个参数,int类型的apertureSize,表示应用Sobel算子的孔径大小,其有默认值3。
// 第六个参数,bool类型的L2gradient,一个计算图像梯度幅值的标识,有默认值false。
public static void canny(String oriImg, String dstImg, int threshold) { System.loadLibrary(Core.NATIVE_LIBRARY_NAME); Mat img = Imgcodecs.imread(oriImg); Imgproc.cvtColor(img, img, Imgproc.COLOR_BGR2GRAY); // Imgproc.Canny(img, img, threshold, threshold * 3, 3, true); // Imgcodecs.imwrite(dstImg, img); }
实例:

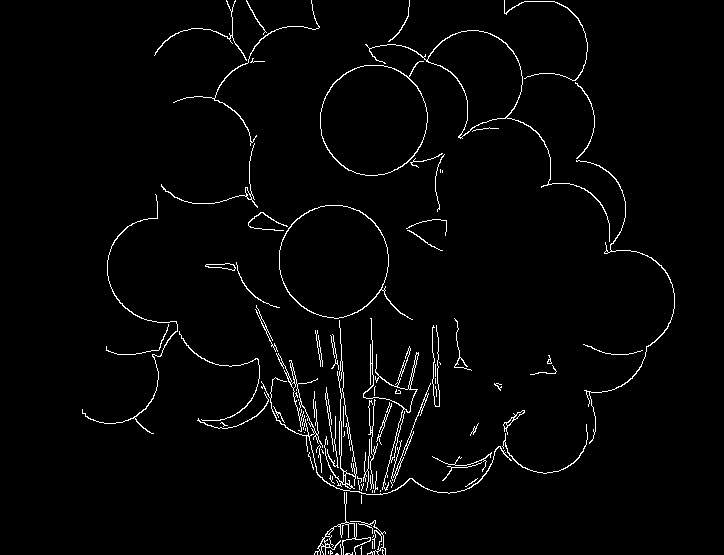
canny:
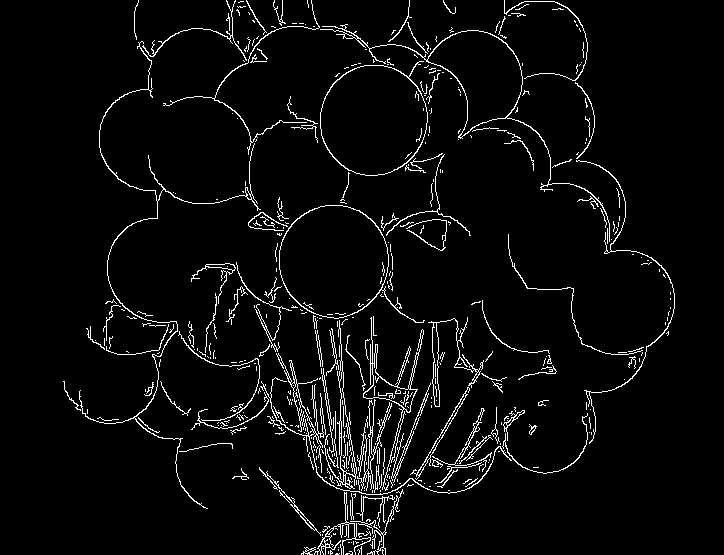
threshold越大,轮廓的要求越高(灰度值变化越明显才能构成轮廓)
上图,thrdshold=20,当设置成50,如下图: