//求轮廓的方向 //第二个函数调用第一个 void drawAxis(Mat&, Point, Point, Scalar, const float); double getOrientation(const vector<Point> &, Mat&);
函数方法如下:
1 void drawAxis(Mat& img, Point p, Point q, Scalar colour, const float scale = 0.2) 2 { 3 double angle = atan2((double)p.y - q.y, (double)p.x - q.x); // angle in radians 4 double hypotenuse = sqrt((double)(p.y - q.y) * (p.y - q.y) + (p.x - q.x) * (p.x - q.x)); 5 // Here we lengthen the arrow by a factor of scale 6 q.x = (int)(p.x - scale * hypotenuse * cos(angle)); 7 q.y = (int)(p.y - scale * hypotenuse * sin(angle)); 8 line(img, p, q, colour, 1, LINE_AA); 9 // create the arrow hooks 10 p.x = (int)(q.x + 9 * cos(angle + CV_PI / 4)); 11 p.y = (int)(q.y + 9 * sin(angle + CV_PI / 4)); 12 line(img, p, q, colour, 1, LINE_AA); 13 p.x = (int)(q.x + 9 * cos(angle - CV_PI / 4)); 14 p.y = (int)(q.y + 9 * sin(angle - CV_PI / 4)); 15 line(img, p, q, colour, 1, LINE_AA); 16 } 17 double getOrientation(const vector<Point> &pts, Mat &img) 18 { 19 //Construct a buffer used by the pca analysis 20 int sz = static_cast<int>(pts.size()); 21 Mat data_pts = Mat(sz, 2, CV_64F); 22 for (int i = 0; i < data_pts.rows; i++) 23 { 24 data_pts.at<double>(i, 0) = pts[i].x; 25 data_pts.at<double>(i, 1) = pts[i].y; 26 } 27 //Perform PCA analysis 28 PCA pca_analysis(data_pts, Mat(), PCA::DATA_AS_ROW); 29 //Store the center of the object 30 Point cntr = Point(static_cast<int>(pca_analysis.mean.at<double>(0, 0)), 31 static_cast<int>(pca_analysis.mean.at<double>(0, 1))); 32 //Store the eigenvalues and eigenvectors 33 vector<Point2d> eigen_vecs(2); 34 vector<double> eigen_val(2); 35 for (int i = 0; i < 2; i++) 36 { 37 eigen_vecs[i] = Point2d(pca_analysis.eigenvectors.at<double>(i, 0), 38 pca_analysis.eigenvectors.at<double>(i, 1)); 39 eigen_val[i] = pca_analysis.eigenvalues.at<double>(i); 40 } 41 // Draw the principal components 42 circle(img, cntr, 3, Scalar(255, 0, 255), 2); 43 Point p1 = cntr + 0.02 * Point(static_cast<int>(eigen_vecs[0].x * eigen_val[0]), static_cast<int>(eigen_vecs[0].y * eigen_val[0])); 44 Point p2 = cntr - 0.02 * Point(static_cast<int>(eigen_vecs[1].x * eigen_val[1]), static_cast<int>(eigen_vecs[1].y * eigen_val[1])); 45 drawAxis(img, cntr, p1, Scalar(0, 255, 0), 1); 46 drawAxis(img, cntr, p2, Scalar(255, 255, 0), 5); 47 double angle = atan2(eigen_vecs[0].y, eigen_vecs[0].x); // orientation in radians 48 return angle; 49 }
例子:
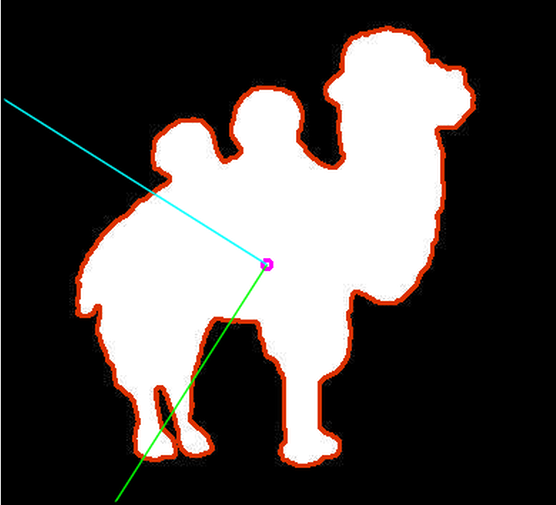
#include "opencv2/core.hpp" #include "opencv2/imgproc.hpp" #include "opencv2/highgui.hpp" #include <iostream> using namespace std; using namespace cv; // Function declarations void drawAxis(Mat&, Point, Point, Scalar, const float); double getOrientation(const vector<Point> &, Mat&); void drawAxis(Mat& img, Point p, Point q, Scalar colour, const float scale = 0.2) { double angle = atan2((double)p.y - q.y, (double)p.x - q.x); // angle in radians double hypotenuse = sqrt((double)(p.y - q.y) * (p.y - q.y) + (p.x - q.x) * (p.x - q.x)); // Here we lengthen the arrow by a factor of scale q.x = (int)(p.x - scale * hypotenuse * cos(angle)); q.y = (int)(p.y - scale * hypotenuse * sin(angle)); line(img, p, q, colour, 1, LINE_AA); // create the arrow hooks p.x = (int)(q.x + 9 * cos(angle + CV_PI / 4)); p.y = (int)(q.y + 9 * sin(angle + CV_PI / 4)); line(img, p, q, colour, 1, LINE_AA); p.x = (int)(q.x + 9 * cos(angle - CV_PI / 4)); p.y = (int)(q.y + 9 * sin(angle - CV_PI / 4)); line(img, p, q, colour, 1, LINE_AA); } double getOrientation(const vector<Point> &pts, Mat &img) { //Construct a buffer used by the pca analysis int sz = static_cast<int>(pts.size()); Mat data_pts = Mat(sz, 2, CV_64F); for (int i = 0; i < data_pts.rows; i++) { data_pts.at<double>(i, 0) = pts[i].x; data_pts.at<double>(i, 1) = pts[i].y; } //Perform PCA analysis PCA pca_analysis(data_pts, Mat(), PCA::DATA_AS_ROW); //Store the center of the object Point cntr = Point(static_cast<int>(pca_analysis.mean.at<double>(0, 0)), static_cast<int>(pca_analysis.mean.at<double>(0, 1))); //Store the eigenvalues and eigenvectors vector<Point2d> eigen_vecs(2); vector<double> eigen_val(2); for (int i = 0; i < 2; i++) { eigen_vecs[i] = Point2d(pca_analysis.eigenvectors.at<double>(i, 0), pca_analysis.eigenvectors.at<double>(i, 1)); eigen_val[i] = pca_analysis.eigenvalues.at<double>(i); } // Draw the principal components circle(img, cntr, 3, Scalar(255, 0, 255), 2); Point p1 = cntr + 0.02 * Point(static_cast<int>(eigen_vecs[0].x * eigen_val[0]), static_cast<int>(eigen_vecs[0].y * eigen_val[0])); Point p2 = cntr - 0.02 * Point(static_cast<int>(eigen_vecs[1].x * eigen_val[1]), static_cast<int>(eigen_vecs[1].y * eigen_val[1])); drawAxis(img, cntr, p1, Scalar(0, 255, 0), 1); drawAxis(img, cntr, p2, Scalar(255, 255, 0), 5); double angle = atan2(eigen_vecs[0].y, eigen_vecs[0].x); // orientation in radians return angle; } int main() { Mat src = imread("4.png"); Mat gray; cvtColor(src, gray, COLOR_BGR2GRAY); // Convert image to binary Mat bw; threshold(gray, bw, 50, 255, THRESH_BINARY | THRESH_OTSU); // Find all the contours in the thresholded image vector<vector<Point> > contours; findContours(bw, contours, RETR_LIST, CHAIN_APPROX_NONE); for (size_t i = 0; i < contours.size(); i++) { drawContours(src, contours, i, Scalar(0, 50, 220), 2); // Find the orientation of each shape getOrientation(contours[i], src); } imshow("output", src); waitKey(); return 0; }