HOG特征原理
HOG特征:
方向梯度直方图(Histogram of Oriented Gradient, HOG)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子。
它通过计算和统计图像局部区域的梯度方向直方图来构成特征。Hog特征结合SVM分类器已经被广泛应用于图像识别中,尤其在行人检测中获得了极大的成功。
HOG+SVM进行行人检测的方法是法国研究人员Dalal在2005的CVPR上提出的,而如今虽然有很多行人检测算法不断提出,但基本都是以HOG+SVM的思路为主。
(1)主要思想:
在一副图像中,局部目标的表象和形状(appearance and shape)能够被梯度或边缘的方向密度分布很好地描述。(本质:梯度的统计信息,而梯度主要存在于边缘的地方)。
(2)具体的实现方法是:
首先将图像分成小的连通区域,我们把它叫细胞单元(cell or patch)。然后采集细胞单元中各像素点的梯度的或边缘的方向直方图。最后把这些直方图组合起来就可以构成特征描述器。
(3)提高性能:
把这些局部直方图在图像的更大的范围内(我们把它叫区间或block)进行对比度归一化(contrast-normalized),所采用的方法是:先计算各直方图在这个区间(block)中的密度,然后根据这个密度对区间中的各个细胞单元做归一化。通过这个归一化后,能对光照变化和阴影获得更好的效果。
(4)优点:
与其他的特征描述方法相比,HOG有很多优点。首先,由于HOG是在图像的局部方格单元上操作,所以它对图像几何的和光学的形变都能保持很好的不变性,这两种形变只会出现在更大的空间领域上。其次,在粗的空域抽样、精细的方向抽样以及较强的局部光学归一化等条件下,只要行人大体上能够保持直立的姿势,可以容许行人有一些细微的肢体动作,这些细微的动作可以被忽略而不影响检测效果。因此HOG特征是特别适合于做图像中的人体检测的。
HOG计算过程
原论文中的计算流程图:

(1)图像预处理
包括伽马校正和灰度化。这是可选的步骤,因为实验证明做不做影响不大。伽马校正是减少光度对实验的影响。灰度化是将彩色图片变成灰度图。其实彩色图片也可以直接处理。不过是分别对三通道的颜色值进行梯度计算,最后选择梯度最大的那个。为简单起见,假设输入为灰度图,同时大小是64*128(这个大小是上面论文的大小,也可以自己确定不同的大小,但是实验效果就不能得到保证)。
(2)计算每一个像素的梯度(大小和原图一样)
A.分别计算水平梯度(horizontal gradient)和垂直梯度(vertical gradient)
使用下面的核(kernel)来计算
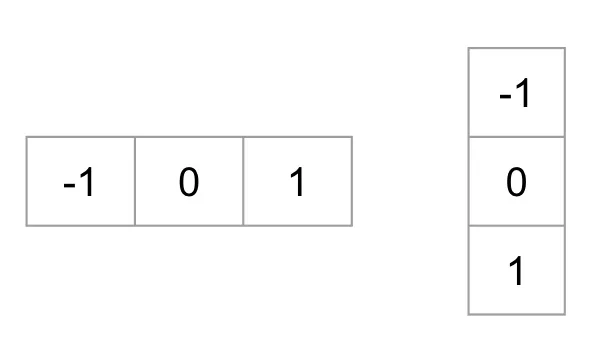
例:
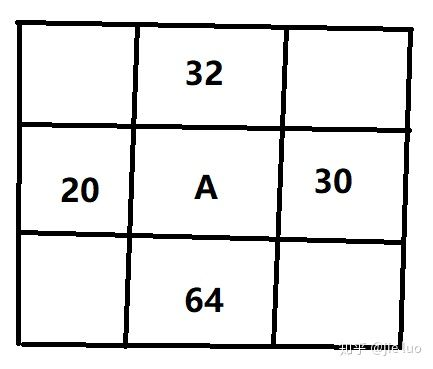
对于像素点A,要计算水平梯度和竖直梯度,如上图,水平梯度  =30-20=10,竖直梯度
=30-20=10,竖直梯度  =64-32=32.
=64-32=32.
// C++ gradient calculation.
// Read image
Mat img = imread("bolt.png");
img.convertTo(img, CV_32F, 1/255.0);
// Calculate gradients gx, gy
Mat gx, gy;
Sobel(img, gx, CV_32F, 1, 0, 1);
Sobel(img, gy, CV_32F, 0, 1, 1);
# Python gradient calculation
# Read image
im = cv2.imread('bolt.png')
im = np.float32(im) / 255.0
# Calculate gradient
gx = cv2.Sobel(img, cv2.CV_32F, 1, 0, ksize=1)
gy = cv2.Sobel(img, cv2.CV_32F, 0, 1, ksize=1)
B.计算梯度大小(magnitude of gradient)和梯度方向(direction of gradient)
梯度大小和梯度方向将按照以下公式计算
梯度方向将会取绝对值,因此梯度方向的范围是0-180度。取绝对值的原因是这样效果更好。
(3)计算梯度直方图
按照第二步的计算,每一个像素点都会有两个值:梯度强度/梯度方向。
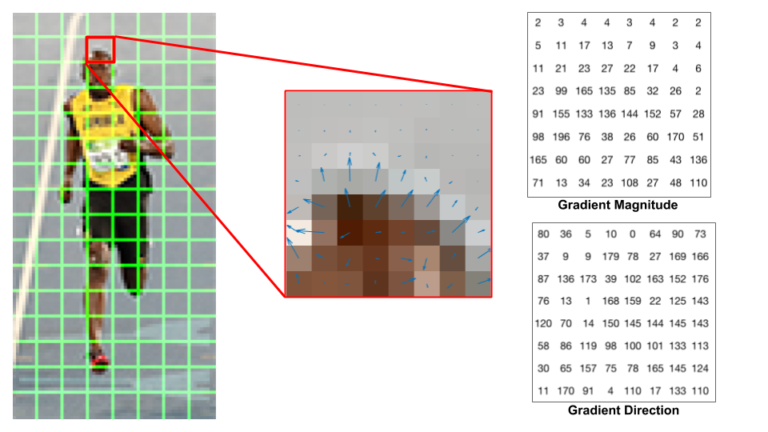
现在计算梯度直方图,这是一个最关键的步骤,也是HOG能够工作的原因。
梯度直方图是在一个88的cell里面计算的。那么在88的cell里面就会有882=128个值,2是包括了梯度强度和梯度方向。通过统计形成梯度直方图,128个值将会变成9个值,大大降低了计算量,同时又对光照等环境变化更加地robust。
首先,我将0-180度分成9个bins,分别是0,20,40...160。然后统计每一个像素点所在的bin。
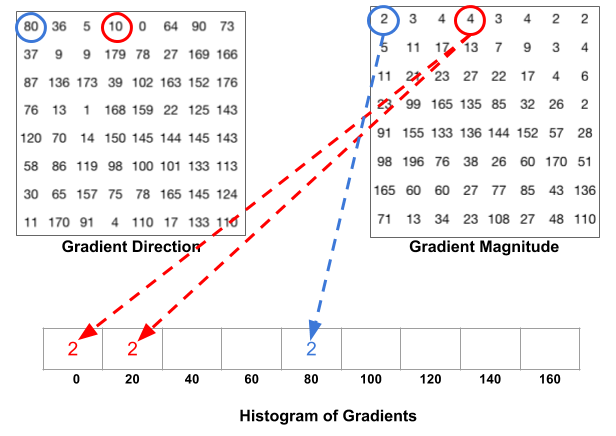
梯度方向为80,梯度大小为2的点:80对应80的位置,值为2;
梯度方向为10,梯度大小为4的点:10在0-20正中间,所以0和2位置值均为2;
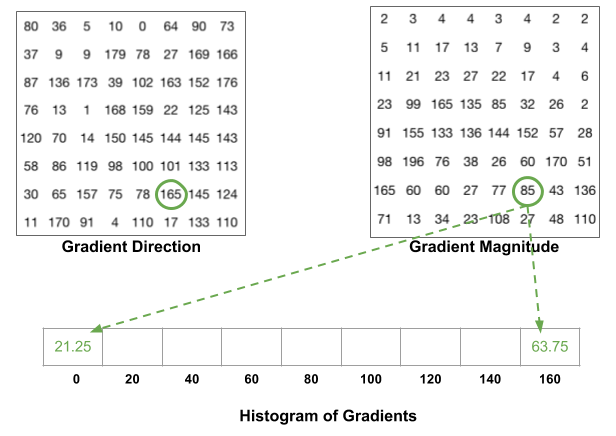
梯度方向为165,梯度大小为85的点:165在160-180之间,所以160位置值为855/20=21.5,0位置值为8515/20=63.5;
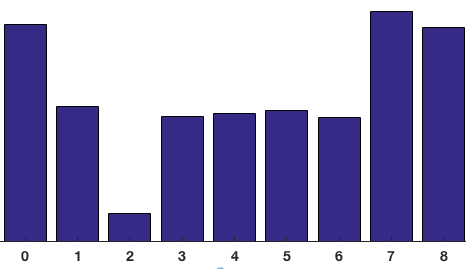
最终得到一个cell的梯度直方图:
归一化
将四个cell组成一个blocks,对16 * 16大小的blocks进行归一化。
归一化的目的是降低光照的影响。
归一化的方法是向量的每一个值除以向量的模长。
比如对于一个(128,64,32)的三维向量来说,模长是 
那么归一化后的向量变成了(0.87,0.43,0.22)
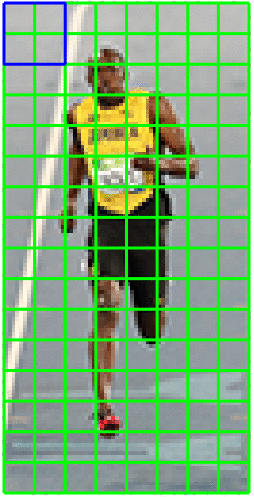
那么16*16大小的block是怎么来的?
请看下图
动图戳这里
{kind=link}
得到HOG特征向量
每一个16 * 16大小的block将会得到36大小的vector。那么对于一个64 * 128大小的图像,按照上图的方式提取block,将会有7个水平位置和15个竖直位可以取得,所以一共有7 * 15=105个block,所以我们整合所有block的vector,形成一个大的一维vector的大小将会是36 * 105=3780。
得到HOG特征向量,就可以用来可视化和分类了。对于这么大的HOG特征,SVM就派上用场了。
结果如图:

代码实现
# @hichens
import cv2
import numpy as np
import math
import matplotlib.pyplot as plt
class Hog_descriptor():
def __init__(self, img, cell_size=16, bin_size=8):
self.img = img
'''
伽马校正
self.img = np.sqrt(img / np.max(img))
self.img = img * 255
'''
self.cell_size = cell_size
self.bin_size = bin_size
self.angle_unit = 360 / self.bin_size
def extract(self):
height, width = self.img.shape
#1.计算每个像素的梯度和方向
gradient_magnitude, gradient_angle = self.global_gradient()
gradient_magnitude = abs(gradient_magnitude)
cell_gradient_vector = np.zeros((height // self.cell_size, width // self.cell_size, self.bin_size))
for i in range(cell_gradient_vector.shape[0]):
for j in range(cell_gradient_vector.shape[1]):
#取一个cell中的梯度大小和方向
cell_magnitude = gradient_magnitude[i * self.cell_size:(i + 1) * self.cell_size,
j * self.cell_size:(j + 1) * self.cell_size]
cell_angle = gradient_angle[i * self.cell_size:(i + 1) * self.cell_size,
j * self.cell_size:(j + 1) * self.cell_size]
#得到每一个cell的梯度直方图;
cell_gradient_vector[i][j] = self.cell_gradient(cell_magnitude, cell_angle)
#得到HOG特征可视化图像
hog_image = self.render_gradient(np.zeros([height, width]), cell_gradient_vector)
#HOG特征向量
hog_vector = []
#使用滑动窗口
for i in range(cell_gradient_vector.shape[0] - 1):
for j in range(cell_gradient_vector.shape[1] - 1):
#4个cell得到一个block
block_vector = cell_gradient_vector[i:i+1][j:j+1].reshape(-1, 1)
#正则化
block_vector = np.array([vector / np.linalg.norm(vector) for vector in block_vector])
hog_vector.append(block_vector)
return hog_vector, hog_image
def global_gradient(self):
#得到每个像素的梯度
gradient_values_x = cv2.Sobel(self.img, cv2.CV_64F, 1, 0, ksize=5)#水平
gradient_values_y = cv2.Sobel(self.img, cv2.CV_64F, 0, 1, ksize=5)#垂直
gradient_magnitude = np.sqrt(gradient_values_x**2 + gradient_values_y**2)#总
gradient_angle = cv2.phase(gradient_values_x, gradient_values_y, angleInDegrees=True)#方向
return gradient_magnitude, gradient_angle
def cell_gradient(self, cell_magnitude, cell_angle):
#得到cell的梯度直方图
orientation_centers = [0] * self.bin_size
for i in range(cell_magnitude.shape[0]):
for j in range(cell_magnitude.shape[1]):
gradient_strength = cell_magnitude[i][j]
gradient_angle = cell_angle[i][j]
min_angle, max_angle, mod = self.get_closest_bins(gradient_angle)
orientation_centers[min_angle] += (gradient_strength * (1 - (mod / self.angle_unit)))
orientation_centers[max_angle] += (gradient_strength * (mod / self.angle_unit))
return orientation_centers
def get_closest_bins(self, gradient_angle):
idx = int(gradient_angle / self.angle_unit)
mod = gradient_angle % self.angle_unit
return idx, (idx + 1) % self.bin_size, mod
def render_gradient(self, image, cell_gradient):
#得到HOG特征图
cell_width = self.cell_size / 2
max_mag = np.array(cell_gradient).max()
for x in range(cell_gradient.shape[0]):
for y in range(cell_gradient.shape[1]):
cell_grad = cell_gradient[x][y]
cell_grad /= max_mag
angle = 0
angle_gap = self.angle_unit
for magnitude in cell_grad:
angle_radian = math.radians(angle)
x1 = int(x * self.cell_size + magnitude * cell_width * math.cos(angle_radian))
y1 = int(y * self.cell_size + magnitude * cell_width * math.sin(angle_radian))
x2 = int(x * self.cell_size - magnitude * cell_width * math.cos(angle_radian))
y2 = int(y * self.cell_size - magnitude * cell_width * math.sin(angle_radian))
cv2.line(image, (y1, x1), (y2, x2), int(255 * math.sqrt(magnitude)))
angle += angle_gap
return image
img = cv2.imread('/home/hichens/Desktop/lena_full.jpg', cv2.IMREAD_GRAYSCALE) # 灰度图片
hog = Hog_descriptor(img, cell_size=8, bin_size=9)
vector, image = hog.extract()
print (np.array(vector).shape)
plt.subplot(121)
plt.imshow(img, cmap=plt.cm.gray)
plt.subplot(122)
plt.imshow(image, cmap=plt.cm.gray)
plt.show()
参考文献
1.目标检测的图像特征提取之(一)HOG特征
2.HOG特征
3.Histogram of Oriented Gradients
4.基于传统图像处理的目标检测与识别(HOG+SVM附代码)