可以用某种顺序容器来实现
(让已有的顺序容器以栈/队列的方式工作)
1) stack: 头文件 <stack> 栈 -- 后进先出
2) queue: 头文件 <queue> 队列 -- 先进先出
3) priority_queue: 头文件 <queue> 优先级队列 -- 最高优先级元素总是第一个出列
都有3个成员函数:
- push: 添加一个元素;
- top: 返回栈顶部或队头元素的引用
- pop: 删除一个元素
容器适配器上没有迭代器
STL中各种排序, 查找, 变序等算法都不适合容器适配器
priority_queue和 queue类似, 可以用vector和deque实现
缺省情况下用vector实现 priority_queue 通常用堆排序技术实现, 保证最大的元 素总是在最前面
- 执行pop操作时, 删除的是最大的元素
- 执行top操作时, 返回的是最大元素的引用
- 默认的元素比较器是 less<T>
STL算法分类
STL中的算法大致可以分为以下七类:
- 不变序列算法
- 变值算法
- 删除算法
- 变序算法
- 排序算法
- 有序区间算法
- 数值算法
大多重载的算法都是有两个版本的
- 用 “==” 判断元素是否相等, 或用 “<”来比较大小。
- 多出一个类型参数 “Pred” 和函数形参 “Pred op” : 通过表达式 “op(x,y)” 的返回值: ture/false 来判断x是否 “等于”y,或者x是否 “小于”y。
如下面的有两个版本的min_element
- iterator min_element(iterator first, iterator last);
- iterator min_element(iterator first, iterator last, Pred op);
1.不变序列算法
- 该类算法不会修改算法所作用的容器或对象
- 适用于顺序容器和关联容器
- 时间复杂度都是O(n)



2.变值算法
- 此类算法会修改源区间或目标区间元素的值
- 值被修改的那个区间, 不可以是属于关联容器的


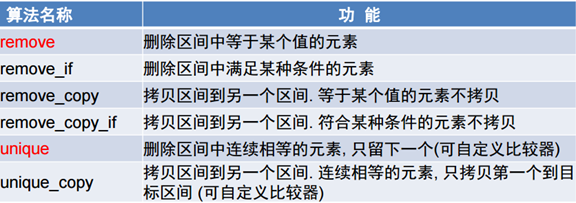
3.删除算法
- 删除一个容器里的某些元素
- 删除 -- 不会使容器里的元素减少
- 将所有应该被删除的元素看做空位子
- 用留下的元素从后往前移, 依次去填空位子
- 元素往前移后, 它原来的位置也就算是空位子
- 也应由后面的留下的元素来填上
- 最后, 没有被填上的空位子, 维持其原来的值不变
- 删除算法不应作用于关联容器
- 算法复杂度都是O(n)的
4.变序算法
- 变序算法改变容器中元素的顺序
- 但是不改变元素的值
- 变序算法不适用于关联容器
- 算法复杂度都是O(n)的


5. 排序算法
- 比前面的变序算法复杂度更高, 一般是O(nlog(n))
- 排序算法需要随机访问迭代器的支持
- 不适用于关联容器和list


6. 有序区间算法
- 要求所操作的区间是已经从小到大排好序的
- 需要随机访问迭代器的支持
- 有序区间算法不能用于关联容器和list


参考链接:
https://www.coursera.org/learn/cpp-chengxu-sheji