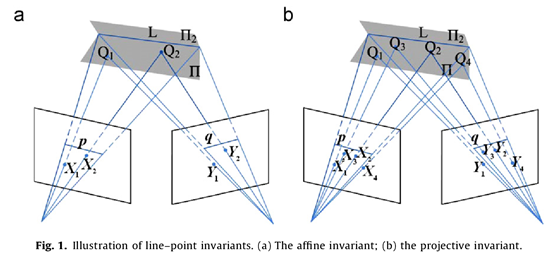
用已知的点匹配实现线匹配,用不共线的4点确定二维点线不变量。 Q1,Q2,Q3,Q4为共面不共线的4点,且L是平面上的直线。经两次透视变换Q1,Q2,Q3,Q4在图像上成像分别为X1,,X2,X3,X4和Y1,Y2,Y3,Y4;L在图像上成像分别为p和q
透视变换矩阵为H,这样

令
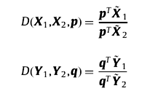
有
令

并记
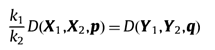
由于r和s是两个视角下的对应线,他们满足
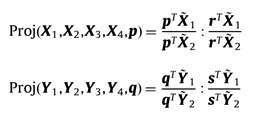
其中k是未知尺度因子。所以,我们有
联合上述等式,有

用已知的点匹配实现线匹配,用不共线的4点确定二维点线不变量。 Q1,Q2,Q3,Q4为共面不共线的4点,且L是平面上的直线。经两次透视变换Q1,Q2,Q3,Q4在图像上成像分别为X1,,X2,X3,X4和Y1,Y2,Y3,Y4;L在图像上成像分别为p和q
透视变换矩阵为H,这样
令
有
令
并记
由于r和s是两个视角下的对应线,他们满足
其中k是未知尺度因子。所以,我们有
联合上述等式,有