利用之前观摩过的寄存器 创建uart4.c 和uart4.h文件串口相关函数发送AD数据
#include "uart4.h" void UART4_Init(U32 BaudRate) { U16 ubd, brfa; U8 temp; PORTC_PCR15 = PORT_PCR_MUX(0x3); //引脚使能 PORTC_PCR14 = PORT_PCR_MUX(0x3); SIM_SCGC1 |= SIM_SCGC1_UART4_MASK; //时钟使能 UART4_C2 &= ~((1<<2) | (1<<3)); //禁止发送接收 控制寄存器C2 UART4_C1 = 0; //控制器C1 全部使用默认配备 ubd = (U16)((PERIPH_SYS_CLK)/(BaudRate * 16)); //波特率设置 UART4_BDH = (U8)ubd>>8; UART4_BDL = (U8)(ubd); brfa = (((PERIPH_SYS_CLK*32)/(BaudRate * 16)) - (ubd * 32)); //波特率微调 1/32的增量 temp = UART4_C4 & ~(UART_C4_BRFA(0x1F)); UART4_C4 = temp | UART_C4_BRFA(brfa); UART4_C2 |= ((1<<2) | (1<<3)); //允许发送接收 return; } void Uart4_SendByte(U8 Char) { while(!(UART_S1_REG(UART4_BASE_PTR) & UART_S1_TDRE_MASK)); //UARTx_S1状态寄存器 UART4_D = Char; return; } U8 Uart4_Receive(void) { U8 Receivechar; while(!(UART_S1_REG(UART4_BASE_PTR) & UART_S1_RDRF_MASK)); //查询是否接受到数据 Receivechar = UART4_D; //接受到8位的数据 return(Receivechar); }
UART4.h
#include "project.h" extern void UART4_Init(U32); extern void Uart4_SendByte(U8); extern U8 Uart4_Receive(void);
创建project.h文件包含需要的头文件和宏定义
#include "common.h" #include "uart.h" //#include "LED.h" #ifndef EnableInterrupts #define EnableInterrupts asm(" CPSIE i"); //开总中断 #endif #ifndef DisableInterrupts #define DisableInterrupts asm(" CPSID i"); //关总中断 #endif typedef unsigned short U16; typedef unsigned long U32; typedef unsigned char U8;
例子的AD端口(PRA8)
AD初始化函数
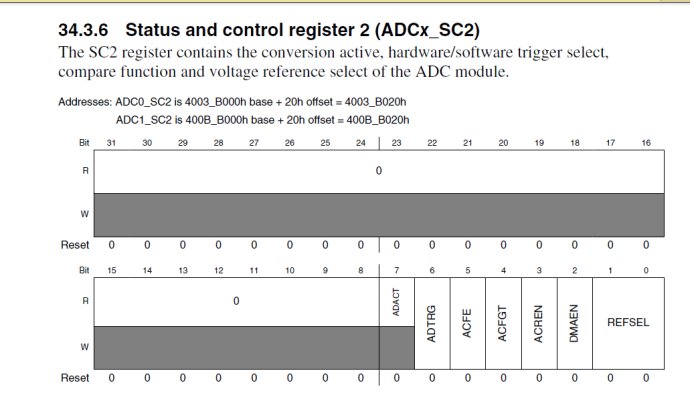
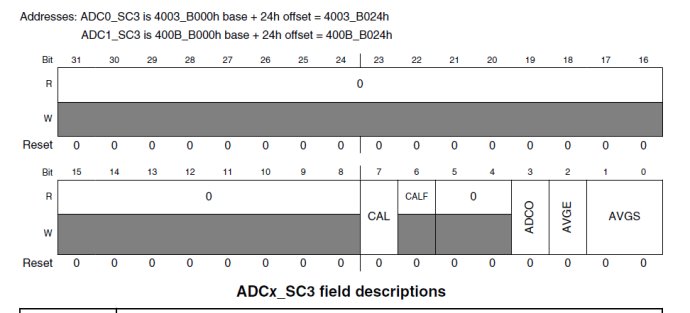
void ADC0_init(void) { SIM_SCGC6 |= (1<<27); ADC0_CFG1 |= (1<<5) //ADIV |(1<<4) // ADLSMP 1 |(3<<2); // MODE 11 ADC0_CFG1 &= ~((1<<6) | (3)); //ADIV 01 ADICLK 00 ADC0_CFG2 |= (1<<2); // ADHSC 1 ADC0_CFG2 &= ~(3); //ADLSTS 00 ADC0_SC2 &= ~(3); // REFSEL 00 电压源选择 ADC0_SC3 |= ((2) // AVGS | (1<<2)); // AVGE 1 使能平均 ADC0_SC3 &= ~(1); // AVGS 10 16次采样平均 }
涉及的寄存器……



AD采集函数
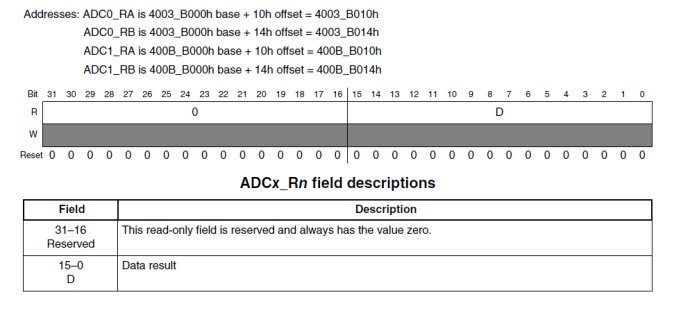
U16 ADC0_SE11_GETDATA(void) { U16 ADResult = 0; ADC0_SC1A &= ~((1<<5) | (1<<6)); //DIDF 0 ALEN 0 ADC0_SC1A &= ~((1<<2) | (1<<4)); //设置AD通道 AD11(PRA8) ADC0_SC1A |= ((1<<3) | (3)); while (!(ADC0_SC1A>>7)); ADResult = ADC0_RA; return(ADResult); }
涉及的寄存器……
主函数
void main(void) { U8 ADC8; U16 ADValue; DisableInterrupts; UART4_Init(115200); ADC0_init(); //ADC0初始化 EnableInterrupts; while(1) { ADValue = ADC0_SE11_GETDATA(); ADC8 = ADValue; Uart4_SendByte(ADValue>>8); Uart4_SendByte(ADC8); delay(10000000); } }
------------------------------华丽的代码分割线---------------------------------------
用杜邦线把电源和地分配引入AD采集引脚 观摩数据正确性
