第一章 VIO概论
当前市面上很少有系统介绍VIO系统的书
一 VIO简介
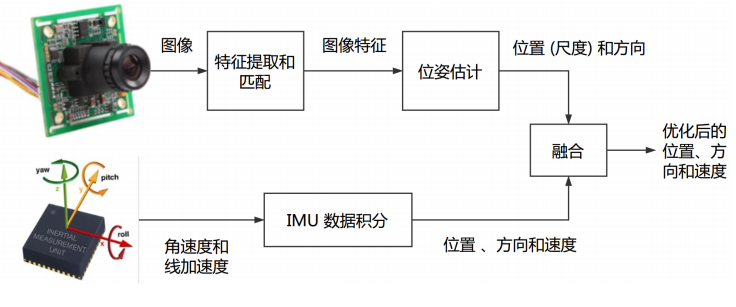
VIO(Visual-Inertial Odometry):以视觉和IMU融合的方法实现定位的里程计
接下来介绍VIO使用到的两个信息
1. IMU(Inertial MeasureMent Unit)惯性测量单元
- 典型的6轴IMU能以较高频率(>= 100Hz)返回被测量物体的角速度和加速度
- IMU的缺点在于,容易收到自身温度、灵片、振动等因素干扰,通过积分直接得到的评议和旋转将产生漂移
2. 视觉信息
- 通过视觉定位的方法即视觉SLAM,主要利用相机采集的图片信息作为输入,采样频率较低(15-60Hz居多)
- 定位的时候主要通过图像特征点或像素推断相机运动
之所以使用以上两个硬件主要是由于二者的互补性。
3. 二者的互补性
IMU与视觉定位的优劣势对比
| 方案 | IMU | 视觉 |
|---|---|---|
| 优势 | 快速响应 不受成像质量影响 角速度普遍比较准确 可估计绝对尺度 |
不产生漂移 直接测量旋转与平移 |
| 劣势 | 存在零偏 低精度IMU积分位子发散 高精度IMU价格昂贵 |
受图像遮挡、运动物体干扰 单目视觉无法测量尺度 单目纯旋转运动无法估计 快速运动时易丢失 |
可以看出视觉与IMU之间存在一定的互补性质:
- IMU适合于计算短时间 快速的运动
- 视觉适合计算长时间 慢速的运动
同时,可以利用视觉定位信息来估计好吃IMU的零偏,减少IMU由零偏导致的发散和累积误差。
反之,IMU也可以为视觉提供快速运动的定位。
应用
IMU数据可以多种定位方案融合
-
自动驾驶中通常使用IMU+GPS差分GPS/RTK的融合定位方案,形成GNSS-INS组合导航系统,打倒厘米组定位精度;
-
头戴式AR/VR头盔则多使用视觉+IMU的VIO定位系统,形成高帧率定位方案
里程计的后端
根据信息融合的方式进行分类 我们可以把视觉里程计分为松耦合和紧耦合两种
-
松耦合
将 IMU 定位与视觉/GNSS 的位姿直接进行融合,融合过程对二者本身不产生影响,作为后处理方式输出。典型方案为卡尔曼滤波器。
-
紧耦合
融合过程本身会影响视觉和 IMU 中的参数(如 IMU 的零偏和视觉的尺度)。典型方案为 MSCKF 和非线性优化。
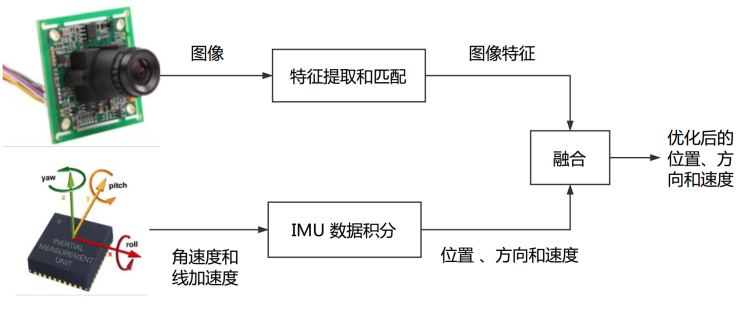
为什么要使用紧耦合?
- 单纯凭(单目)视觉或 IMU 都不具备估计 Pose 的能力:视觉存在尺度不确定性、IMU 存在零偏导致漂移;
- 松耦合中,视觉内部 BA 没有 IMU 的信息,在整体层面来看不是最优的。
- 紧耦合可以一次性建模所有的运动和测量信息,更容易达到最优。
二 预备知识
2.1 三维刚体运动的表示
首先需要在机器人/车辆上定义各种坐标系,如:
- 世界坐标系 W;
- IMU坐标系 I;
- 相机坐标系 C;
坐标系之间的变换关系由一个SE(3)给出。如I到W系的变换矩阵:(T_{W_i})
(R_{WI})为(3 imes 3)的旋转矩阵,(t_{WI})为平移向量。
(T_{WI})右乘一个I系下(其次)坐标,将得到该点W系下坐标。
通常默认有以下约定:
- 当某个量表达坐标系的转换关系,写在右下脚标,例如(T_{WB})。
- 当表达矢量在某坐标系中取的坐标时,写在右上角标,如(v^{omega})表达速度矢量在World系坐标
- IMU坐标系即I系也称为Body系。
- 定义明确时,有时会省略该脚标,我们会直接谈论R,t这样的量
- 不刻意区分齐次和非齐次坐标,因为在程序中可以自动完成转换,且无歧义
- 默认以 (T_{WI}) 表达并存储 IMU 的定位信息,而不是 (T_{IW}) 。二者实际互为逆,存储哪一类区别不大,视习惯而定。
- 同理,(T_{WI}) 的平移部分可直接视作 IMU 在世界中的坐标,从而进行绘图或可视化操作。
四元数
旋转矩阵 R 亦可用四元数 q 描述。
-
四元数 q 有一个实部和三个虚部。我们把实部写在前:(q = [q0, q1, q2, q3]^⊤) 或 (q = [w, x, y, z]^⊤)
其中 (q_0) 为实部,([q_1, q_2, q_3]^⊤) 为虚部。因为实部为标量,虚部为矢量,所以也可记为:
[q = [s, v]^⊤ ]其中 s 为标量,v 为虚部的矢量。
四元数乘法

此外,四元数可类似复数,定义加减、模长、逆、共轭等运算,不一一展开。
角速度:
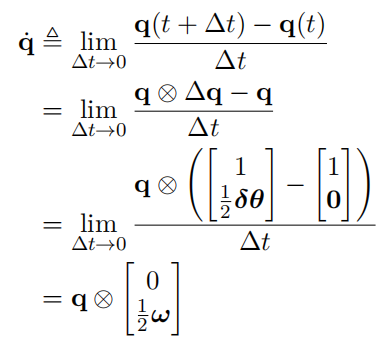
四元数的导数
李代数
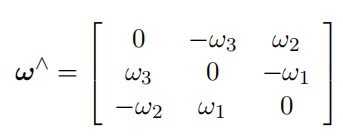
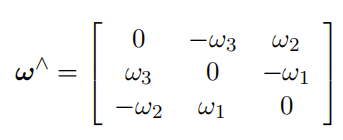
除了利用四元数求导,亦可利用李代数进行旋转求导。使用旋转矩阵 R 时,角速度为 ω,那么 R 相对于时间的导数可写作:
该式被称为泊松公式(Possion’s equation),其中 ∧ 为反对称矩阵算子:
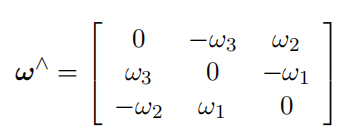
在本课程中亦记作:(ω_×) 或者 ([ω]_×),表达含义相同。
so(3) 导数
在优化带有旋转的函数时,通常计算一个增量 ϕ ∈ so(3),然后用它更新当前估计值:
其中 exp 为 so(3) 至 SO(3) 上的指数映射。
本课程习惯为右乘,实际当中左右乘等价,仅为习惯上的差别。
注:(i) 不同的 R 函数,具体的导数形式也不同。(ii) 在程序中,不必区分 R 是以矩阵存储或是以四元数存储,只需按照该式更新即可。
2.2 重要的雅克比求导
常见的一些雅可比(以自变量为 R 举例):
1. 旋转点的左扰动雅可比:

(中间的变换可以考虑向量的叉乘形式)。
2. 旋转点的右扰动雅克比

3. 旋转连乘的雅克比:
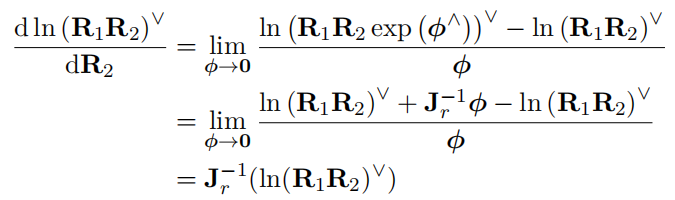
其中用到了对(R):
和(J_r^{-1})为SO3上的右雅克比:

4. 旋转连乘的雅克比:
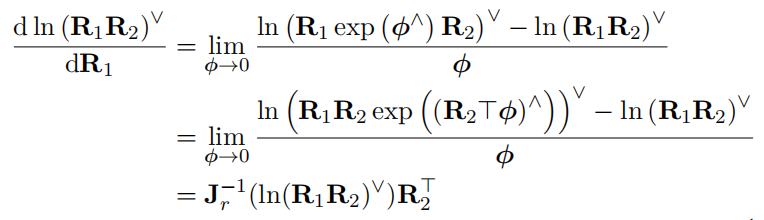
这里用到了SO(3)的伴随性质:

有关 SE(3):由于 SE(3) 李代数性质复杂,在 VIO 中,我们通常使用SO(3) + t 的形式表达旋转和平移。对平移部分使用矢量更新而非SE(3) 上的更新。
三 后续作业
3.1 VIO 文献阅读
阅读VIO 相关综述文献如a,回答以下问题:
1. 视觉与IMU 进行融合之后有何优势?
答:
视觉定位的优点在于不会产生漂移,可以直接测量旋转和平移;缺点在于当存在外界图像遮挡、且运动物体干扰时影响较大,定位不准;当使用单目视觉进行测量时还存在尺度不确定性的问题,而且单目视觉定位无法估计纯旋转运动;当相机快速运动时定位容易丢失。
IMU的优点在于输出频率高(100hz以上)能够快速响应,受外界影响小(不受成像质量影响),角速度普遍比较准确,并且可估计绝对尺度;缺点在于IMU受温度影响,存在零偏;并且使用低精度IMU得到积分容易发散,长时间跟踪容易产生累积漂移。而高精度的IMU价格比较昂贵。
2. 有哪些常见的视觉+IMU 融合方案?有没有工业界应用的例子?
常见的视觉+IMU融合方案包括:
- VINS-mono及各种改进(VINS_Fusion)
- MSCKF (基于KF滤波器实现)
- OKVIS
- ROVIO
- VIORB
- ICE-BA(百度)
工业界应用的例子包括AR Core。虚拟现实领域中AR Kit 通过VIO实现移动设备在空间中的精确定位。在虚拟现实头显中的Inside-out 定位中,目前被广泛采用的方案就是视觉惯性传感器融合实现 SLAM的 VINS 算法。
3.在学术界,VIO 研究有哪些新进展?有没有将学习方法用到VIO中的例子?你也可以对自己感兴趣的方向进行文献调研,阐述你的观点
目前的学术界中,VIO提高的主要方向包括精度、鲁棒性、效率三部分;
在VIO中,可以深度学习网络来预测相机的位姿状态、场景深度等。还可以使用深度网络剔除动态物体等以提高VIO系统的鲁棒性。
利用了深度学习的例子包括有D3VO(使用深度学习来预测场景深度、光度、姿态等),VINet(使用深度网络来预测相机位姿)DeepVO(使用网络来预测位姿)等;
3.2 四元数和李代数更新
课件提到了可以使用四元数或旋转矩阵存储旋转变量。当我们用计算出来的对某旋转更新时,有两种不同方式:
或
请编程验证对于小量(omega = [0.01, 0.02, 0.03]^T),两种方法得到的结果非常接近,实践当中可视为等同。因此,在后文提到旋转时,我们并不刻意区分旋转本身是q 还是R,也不区分其更新方式为上式的哪一种。
答:
编程过程包括如下步骤:
- 生成初始的四元数和随机矩阵
- 利用小量生成旋转角和旋转轴,得到对应的旋转矩阵和四元数
- 更新四元数和旋转矩阵
- 计算差值
部分源代码如下:
int main()
{
Vector3d w(0.01,0.02,0.03); //旋转向量 可以理解为角速度
//生成一个随机的旋转矩阵
Vector3d v = Vector3d::Random();
v.normalize();
// Matrix3d R = Eigen::Matrix3d::Random();
Matrix3d R = Eigen::AngleAxisd(M_PI/4,v).toRotationMatrix();
Quaterniond q(R);
cout<<"初始四元数:"<< endl <<q.coeffs().transpose()<<endl;
cout<<"初始旋转矩阵:"<< endl <<R<<endl;
//获得旋转向量对应的旋转角
double theta = w.norm(); //旋转对应的旋转角
Vector3d n_w = w/theta; //归一化得到旋转角得到的旋转轴
//利用旋转角更新旋转矩阵
Matrix3d DeltaR = AngleAxisd(theta,n_w).toRotationMatrix();
Matrix3d R_update = R*DeltaR;
cout<<"更新后的旋转矩阵:"<<endl<<R_update<<endl;
//利用小量更新四元数
Quaterniond deltaq(1,w(0)/2,w(1)/2,w(2)/2);
Quaterniond q_update = q*deltaq;
//更新之后对四元数进行归一化
//q_update = q_update.normalized(); //1
q_update.normalize();
cout<<"更新后的四元数:"<<endl<<q_update.coeffs().transpose()<<endl;
cout<<"两种方法得到的结果之差:"<<endl;
cout<<q_update.toRotationMatrix()-R_update<<endl;
return 0;
}
生成结果如图所示:

可以看出最后结果的差值在小数点后六位,因此两种方法效果类似。
3.3 其他导数推导
使用右乘(so(3)),推导一下导数:
答:推导过程如下:
用到的性质如下:
一:(R)、(exp(phi^{wedge}))和(Rexp(phi^{wedge}))都代表旋转矩阵,旋转矩阵的逆与转置相等,这里所有的逆都相当于转置,也就是用的矩阵转置的性质((Rexp(phi^{wedge}))^{-1} = exp(phi^{wedge})^{-1}R^{-1})(来自网络)
二:泰勒展开:(exp{varphi^{wedge}}approx I+varphi^{wedge})
三:反对称矩阵:((varphi^{wedge})^T = -varphi^{wedge})
四:《视觉-SLAM十四讲》P42,概括为如下公式:(a imes b=a^wedge b=-b imes a=-b imes a)。
重要的几个点
其中第三行第四行用到了伴随矩阵的性质(在SLAM第四讲中有学)
第四行到第五行使用了如下性质: