1.创建一个包,如example_pkg
catkin_create_pkg example_pkg 2.创建MyNodeletClass.h文件
cd ~/catkin_ws/src/example_pkg/
mkdir -p include/example_pkg
touch include/example_pkg/MyNodeletClass.h
vim include/example_pkg/MyNodeletClass.h
其内容为
#include <nodelet/nodelet.h>
namespace example_pkg
{
class MyNodeletClass : public nodelet::Nodelet
{
public:
virtual void onInit();
};
} 3.创建MyNodeletClass.cpp文件
cd ~/catkin_ws/src/example_pkg/
mkdir src
touch src/MyNodeletClass.cpp
vim src/MyNodeletClass.cpp
其内容为
// this should really be in the implementation (.cpp file) #include <ros/ros.h> #include <pluginlib/class_list_macros.h> #include <example_pkg/MyNodeletClass.h> namespace example_pkg { void MyNodeletClass::onInit() { NODELET_DEBUG("Initializing nodelet..."); ROS_INFO("Nodelet is Ok for test!!"); } } // watch the capitalization carefully PLUGINLIB_DECLARE_CLASS(example_pkg, MyNodeletClass, example_pkg::MyNodeletClass, nodelet::Nodelet)
成功则输出"Nodelet is Ok for test!!"
4.创建nodelet_plugins.xml文件
cd ~/catkin_ws/src/example_pkg/ mkdir plugins touch plugins/nodelet_plugins.xml vim plugins/nodelet_plugins.xml
其内容为
<library path="lib/libexample_pkg">
<class name="example_pkg/MyNodeletClass" type="example_pkg::MyNodeletClass" base_class_type="nodelet::Nodelet">
<description>
This is my nodelet.
</description>
</class>
</library>5.修改package.xml文件,增加:
cd ~/catkin_ws/src/example_pkg/ vim package.xml
其内容为
<buildtool_depend>catkin</buildtool_depend> <build_depend>nodelet</build_depend> <build_depend>roscpp</build_depend> <run_depend>nodelet</run_depend> <run_depend>roscpp</run_depend> <!-- The export tag contains other, unspecified, tags --> <export> <!-- Other tools can request additional information be placed here --> <nodelet plugin="${prefix}/plugins/nodelet_plugins.xml" /> </export>
6.修改CMakeLists.txt
cd ~/catkin_ws/src/example_pkg vim CMakeLists.txt
其内容为
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
include
${catkin_INCLUDE_DIRS}
${Boost_INCLUDE_DIRS}
)
## Declare a C++ library
add_library(${PROJECT_NAME} src/MyNodeletClass.cpp)
add_dependencies(${PROJECT_NAME}
${${PROJECT_NAME}_EXPORTED_TARGETS}
${catkin_EXPORTED_TARGETS}
)
target_link_libraries(${PROJECT_NAME}
${catkin_LIBRARIES}
)6.创建mynodelet.launch文件
d ~/catkin_ws/src/example_pkg/ mkdir launch touch launch/mynodelet.launch vim launch/mynodelet.launch
其内容为
<launch>
<node pkg="nodelet" type="nodelet" name="standalone_nodelet" args="manager" output="screen"/>
<node pkg="nodelet" type="nodelet" name="MyNodeletClass" args="load example_pkg/MyNodeletClass standalone_nodelet" output="screen">
</node>
</launch>6.编译
cd ~/catkin_ws/
catkin_make
rospack profile7.运行
- 新终端,运行roscore
$ roscore
- 新终端,运行launch
$ rosluanch examples_pkg mynodelet.launch
参考:
http://www.ncnynl.com/archives/201702/1326.html
http://blog.csdn.net/zhangrelay/article/details/62048915
http://rosclub.cn/post-164.html
http://blog.csdn.net/yiranhaiziqi/article/details/53308657
http://www.lai18.com/content/2386868.html
例子
http://blog.csdn.net/zyh821351004/article/details/52143309
创建包nodelet_test,依赖项nodelet roscpp std_msgs

CMakeLists.txt
- cmake_minimum_required(VERSION 2.8.3)
- project(nodelet_test_pkg)
- find_package(catkin REQUIRED COMPONENTS nodelet roscpp std_msgs)#
- ## Setup include directories
- include_directories(${catkin_INCLUDE_DIRS})
- catkin_package(
- )
- add_library(nodelet_test plus.cpp)
- target_link_libraries(nodelet_test ${catkin_LIBRARIES})
package.xml
- <package>
- <name>nodelet_test_pkg</name>
- <version>0.0.0</version>
- <description>Nodelet test.</description>
- <maintainer email="huasheng_zyh@163.com">kint zhao</maintainer>
- <license>BSD</license>
- <buildtool_depend>catkin</buildtool_depend>
- <build_depend>nodelet</build_depend>
- <build_depend>roscpp</build_depend>
- <build_depend>std_msgs</build_depend>
- <run_depend>nodelet</run_depend>
- <run_depend>roscpp</run_depend>
- <run_depend>std_msgs</run_depend>
- <export>
- <nodelet plugin="${prefix}/nodelet_test_plugin.xml"/>
- </export>
- </package>
plugin
- <library path="lib/libnodelet_test_lib">
- <class name="nodelet_ns/Plus" type="nodelet_ns::Plus" base_class_type="nodelet::Nodelet">
- <description>
- A node to add a value and republish.
- </description>
- </class>
- </library>
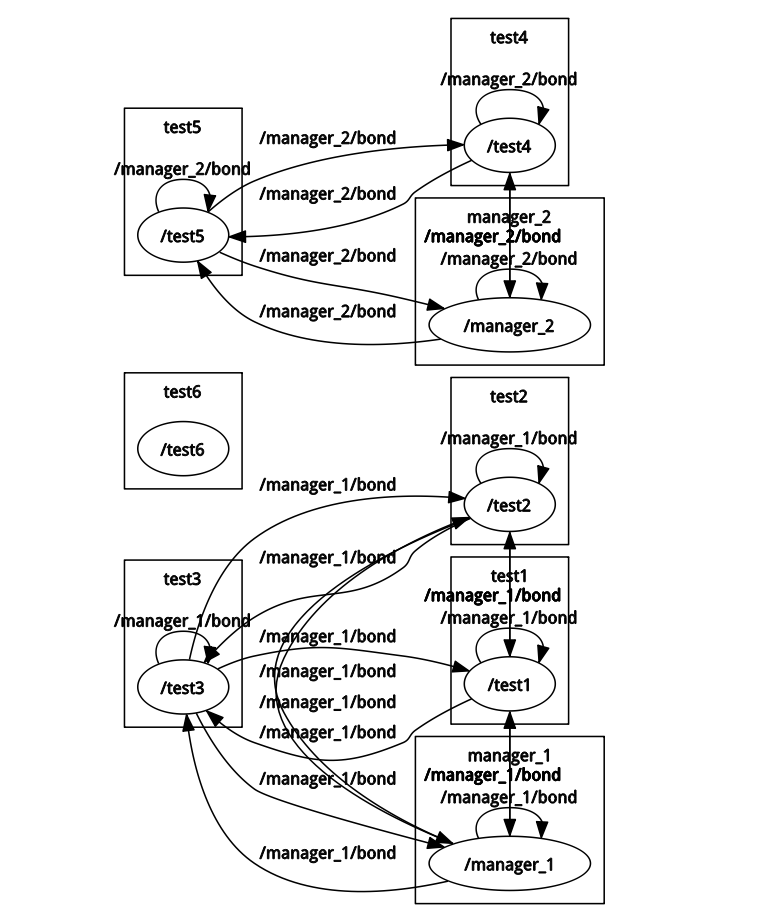
launch
- <launch>
- <node pkg="nodelet" type="nodelet" name="manager_1" args="manager" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="test1" args="load nodelet_ns/Plus manager_1" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="test2" args="load nodelet_ns/Plus manager_1" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="test3" args="load nodelet_ns/Plus manager_1" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="manager_2" args="manager" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="test4" args="load nodelet_ns/Plus manager_2" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="test5" args="load nodelet_ns/Plus manager_2" output="screen"/>
- <node pkg="nodelet" type="nodelet" name="test6" args="standalone nodelet_ns/Plus " output="screen"/>
- </launch>
.cpp文件
- #include <pluginlib/class_list_macros.h>
- #include <nodelet/nodelet.h>
- #include <ros/ros.h>
- #include <std_msgs/Float64.h>
- #include <stdio.h>
- #include <math.h> //fabs
- namespace nodelet_ns
- {
- class Plus : public nodelet::Nodelet
- {
- public:
- Plus()
- : value_(0)
- {}
- private:
- virtual void onInit()
- {
- ros::NodeHandle& private_nh = getPrivateNodeHandle();
- private_nh.getParam("value", value_);
- pub = private_nh.advertise<std_msgs::Float64>("out", 10);
- sub = private_nh.subscribe("in", 10, &Plus::callback, this);
- }
- void callback(const std_msgs::Float64::ConstPtr& input)
- {
- std_msgs::Float64Ptr output(new std_msgs::Float64());
- output->data = input->data + value_;
- NODELET_DEBUG("Adding %f to get %f", value_, output->data);
- pub.publish(output);
- }
- ros::Publisher pub;
- ros::Subscriber sub;
- double value_;
- };
- PLUGINLIB_DECLARE_CLASS(nodelet_ns, Plus, nodelet_ns::Plus, nodelet::Nodelet);//*******
- }