1.Gazebo概述
在Gazebo中的模拟效果是非常好的.
它的特性
Dynamics Simulation
直接控制物理引擎参数
Building Editor
无需代码即可在Gazebo中创建机器人模型(只用insert就可以插入各种模型,可以在基于Gazebo的云端中创建机器人模型)
Advanced 3DGraphics
提高真实性
Sensors
提供激光雷达,摄像头,RGBD摄像头,IMU等传感器
Robot Models
提供多种机器人模型,包括PR2,iRobot,Create,TurtleBot,机械臂,灵巧手等
Environments
提供多种模拟环境
Programmatic Interfaces
支持ROS,API接口.
Gazebo构架(由服务器和客户端组成)
服务器:其作用是执行物理循环,生成传感器数据
执行文件:gzserver
Libraries:Physics(物理环境模拟),Sensors(传感器),Rendering(用于渲染),Transport(传输数据)
客户端:其作用提供用户交互和可视化仿真
执行文件:gzclient
Libraries:Transport,Rendering,GUI
如何运行gazebo
有两种方式:
1.单独运行server和client
gzserver
gzclient
2.同时运行gazebo server和client
gazebo
如果从ros中启动,则使用
rosrun gazebo_ros gazebo
本版本的ros是indigo,gazebo的版本为2.2,它有一个故障问题,即找不到models,
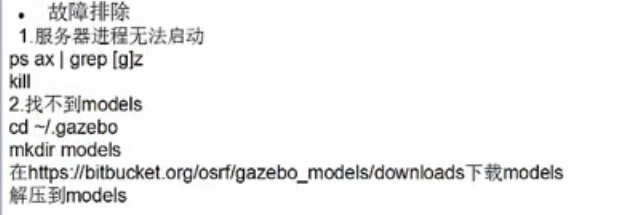
Ubuntu下显示隐藏文件,使用快捷键ctrl+h


下载完上面的文件之后,才可以运行Gazebo.
运行之前启动roscore,再运行rosrun gazebo_ros gazebo

从上面可以看出在world下面提供了Scene,Physics,Models(模拟各种模型,默认只有一个地平面),LIghts(模拟光线).
insert下面包含各种Models.

按住shift+z可以进行左右旋转
将上面内容保存 save world as,其格式为sdf
它默认的launch文件
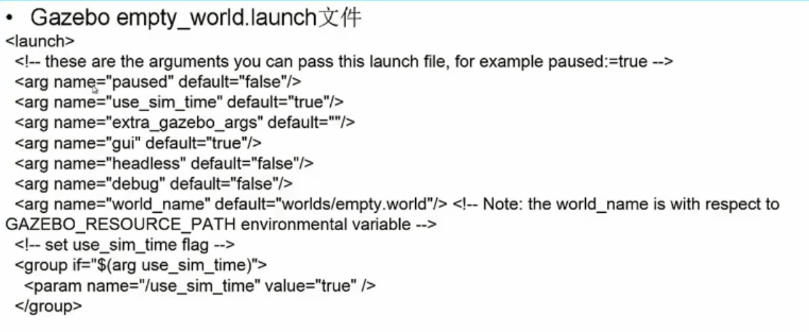
在上面的文件中paused表示以暂停模式运行
use_sim_time表示使用模拟时间
extra_gazebo_args表示表示外部的其他参数
gui表示窗口模式
world_name默认是worlds/empty.world,我们可以指定自己的文件比如之前保存的demo_world.sdf文件,在后面直接把launch文件里面empty_world继承一下,然后把下面的参数默认换成自己的demo_world.world来运行刚刚配置好的世界.

上面的3个参数是跟在gazebo_ros中的参数,第一个参数是否暂停运行,第二个参数为headless,第三个参数为是否详细运行.
下面的script_type,如果是debug就运行debug,否则运行gzserver.
最下面是client的参数,如果选择gui的话.
willowgarage_world.launch文件继承自empty_world.launch文件

刚开始直接包含了empty_world.launch文件,然后把参数换成willowgarage.wold文件.
下面的参数是跟empty_world.launch是一样的可以不用指定.

TurtleBot in gazebo

下面看一下turtlebot的urdf文件
xacro::macro是支持描述文件的一种格式,

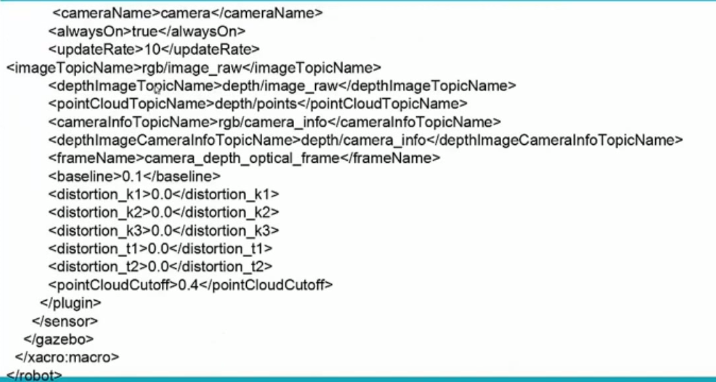
URDF(机器人描述的文件)的生成,

Turtlebot navigation

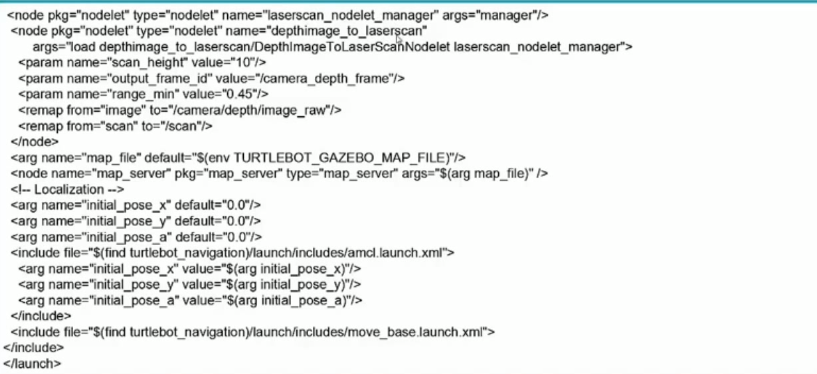
为了能够控制启动的机器人,把下面的一行加入文件turtlebot_gmapping.launch


如果不加就会出现如下错误

按照上面修改过后正确运行之后,再运行rviz
rosrun rviz rviz
然后再在rviz中添加如下内容

最后rviz中的显示结果如下:

看一下上面都发布了那些主题



它发布的主题跟move_base基本上是一致的.
它也有/move_base/goal这个主题,就是rviz上面的2d导航.
下面来启动一下turtlebot的gmapping
roslaunch turtlebot_navigation turtlebot_gmapping.launch ,同样需要按照上面的方式进行修改.
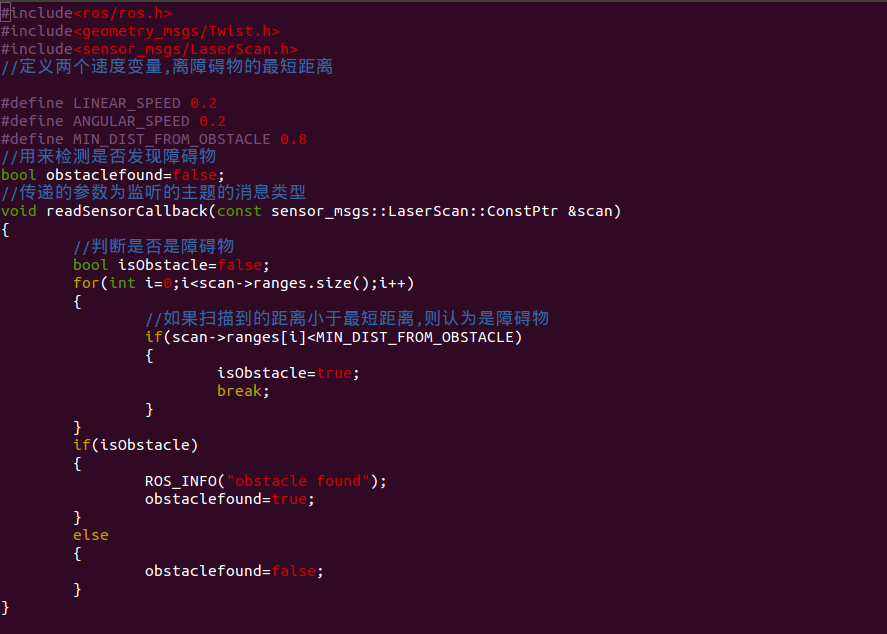
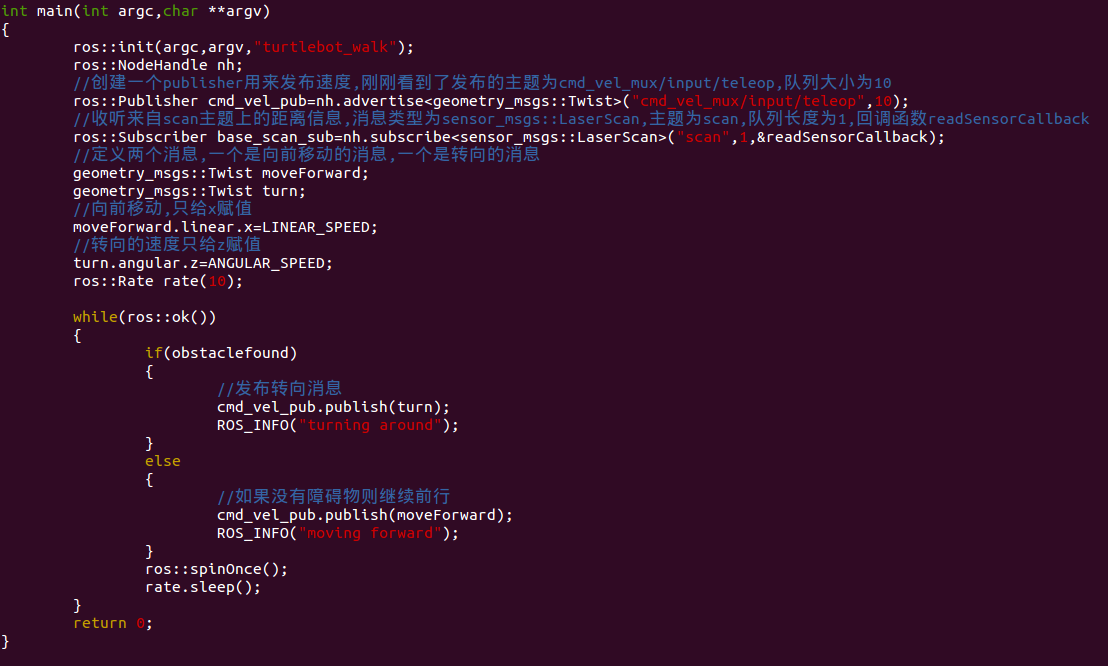
下面来写一个避障的程序,首先需要一个/scan主题,用它来发现离障碍物的距离.以及控制机器人运动的主题为
/cmd_vel_mux/input/teleop
在之前的包为turtlebot_navigation下的src下创建源文件turtlebot_walk.cpp
CMakeLists.txt
文件内容


package.xml

然后在launch文件的turtlebot_amcl.launch中加入下面内容,启动本程序的节点

下面运行一个turtlebot_amcl.launch文件
roslaunch turtlebot_navigation turtlebot_amcl.launch

关闭该节点.