在这一章节将学习如何控制底座移动,这里的底座是通过一对差速驱动轮子和一个被动转动的轮子来保持平衡。ROS还可以被用来控制全方向移动底座,控制飞行机器人或者水下交通工具,不过陆地上行走的差速驱动机器人比较适合初学者。
1、单位长度和坐标系
在给机器人传送指令前,复习一下ROS使用的单位长度和坐标系惯例
1)在参考框架下工作时,记住ROS确定坐标轴方向使用的是右手坐标系,如下
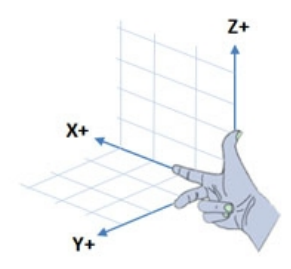
所以,对于 ROS 机器人,如果以它为坐标系的原心,那么:
- x轴:前方
- y轴:左方
- z轴:上方

2)旋转方向
旋转的方向是由右手法则来定义的,如下

3)测量单位
在ROS系统使用公制作为计量系统,线速度通常使用米/秒(m/s)作为单位,角速度使用弧度/秒(rad/s)作为单位。对于室内机器人来说0.5m/s的线速度是比较快的速度,而1.0rad/s相当于6秒转1圈或者每分钟10圈。当不确定设定什么速度时,一般用较慢的速度启动并慢慢提升速度。对于室内机器人,通常设定它的最大线速度保持在0.2m/s或以下。
例子:下面这条命令不用运行,只是为了讲解后面数字参数的意义。
$ rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]' 这句话就是给 /turtle1/cmd_vel 话题发布一次:让机器人 向x轴正方向前进:线速度:2.0m/s; 绕z轴正方向旋转:角速度:1.8rad/s。