1、激光分类
维度分类:
a、二维激光(单点反射、平面、旋转台)
b、三维激光
距离分类:
a、近距离:壁障、碰撞检测、路边检测
b、远距离:行人检测、定位、建图
特点:
优点:
a、可以直接获取深度信息;
b、不受环境光照影响,比较稳定;
缺点:
a、稀疏性;
b、几何信息区分度小;
SLAM研究历史
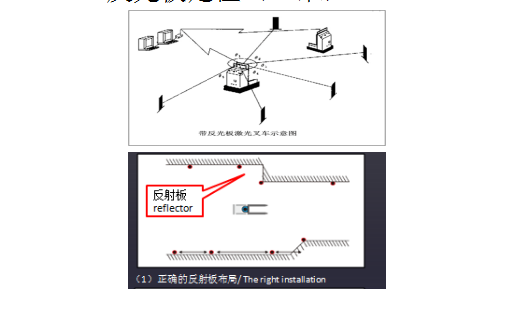
1、反光板定位(二维)
2、ekf特征定位(二维) 主要形式为角点、线。 一般要配以里程计、imu,或者运动模型来提供运动预测 算法以ekf、粒子滤波等模型形式。
http://blog.csdn.net/renshengrumenglibing/article/details/8604245
3、点或特征的ICP(二维) 里程计推导用直接的ICP替代了之前的efk过程。 定位使用粒子滤波方式。 最有代表性的是gmapping
4、技巧 1.去除信息量较少的点、例如分割去除地面、动态物体等 2.只提取一些关注信息,例如路牙 3.多种方法融合,ndt和特征、激光和相机等。 4.往二维方法上靠,二维网格、二维配准方法等。 5.隐性的借鉴十年前的有效方法 6.更强调工程型,例如行人检测等内容 7.闭环检测很多情况下不需要、不现实。(A Flexible and Scalable SLAM System with Full3D Motion Estimation)。
LOAM