第一章 绪论
22:57:03
没什么可记录的。
第二章 离散规划
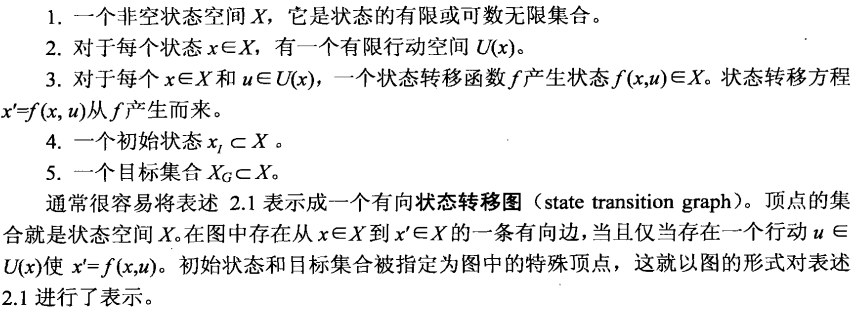
2.1.离散可行规划表述
表述2.1
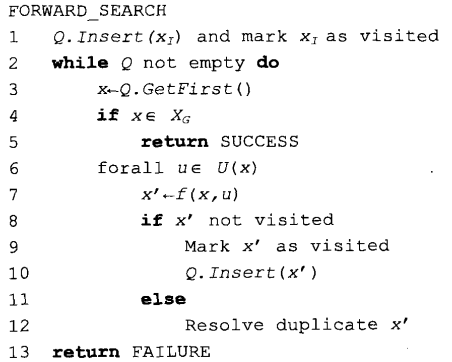
2.2.可行规划的搜索
一般前向搜索、特殊前向搜索、其他搜索方案
2.3.离散最优规划
表述2.2(离散固定长度最优规划)

2.3.1 最优定长规划
最优性原则直接导致一种迭代算法--值迭代(value iteration),它能够解决一大类最优规划问题,包括变长度规划、随机不确定性、不完美状态测量等。
-
后向值迭代
先回忆一下上节的几个定义,L表示K步规划的代价泛函(cost functional),
F表示最后一个阶段,F=K+1,
阶段数K是一个规划的准确长度,即包含K个行动u1~uK。
定义了一个累积代价G*k,

上式通过一系列的数学变换,得到了一个迭代公式:
![]()
![]()
大概过程就是这样,有个概念不懂:![]()
- 例2.3 (五状态最后规划问题)
看不懂呀
-
前向值迭代
看不懂呀。先暂停一下,找点基础的论文看看,再来接着看本书。
2.3.2 不指定长度的最优规划
2.3.3 再论Dijkstra算法
整个2.3节,没有完全看懂,这里先跳过,去看一下数据结构与算法里边的动态规划和Dijkstra算法,再回来看部分。